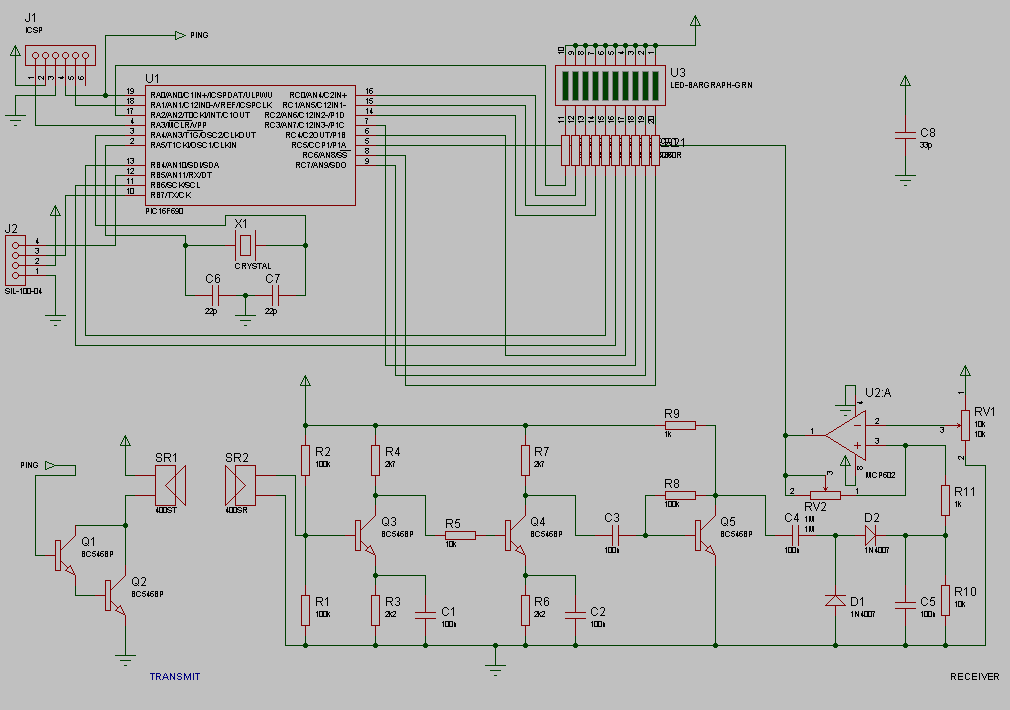
evo zakacena sema i source ... (pic 16F690 na 8MHz - koristi kristal zbog tacnosti)
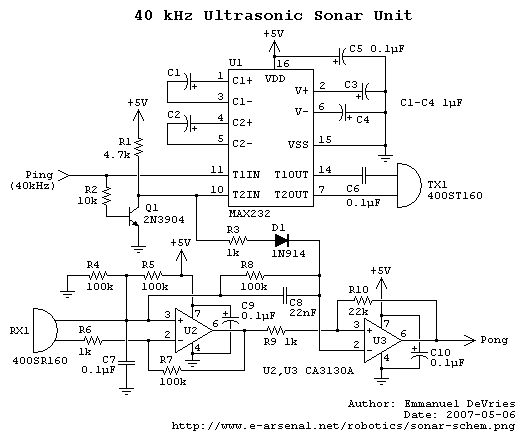
moze predaja da se odradi i drugacije ako je potrebna veca snaga (na primer sa max232) ali i ovako radi ... preciznost je veca od 1cm
on ima tu i neki led bar kojim prikazuje "blizu daleko" ... ja sam to pravio za neki robot kao detektor prepreka...
moras da odradis "kalibraciju" tj, moras da nadjes gde ti je 0 ... i da tu vrednost oduzmes od "daljine" .. ja sam to radio na klijentu posto je 0 razlicita u odnosu na to gde se montiraju kapisle...
Code:
//Make the 40KHz ping
#define PING_PORT PORTA.F0
#define PING_ON_DELAY 12
#define PING_OFF_DELAY 12
void ping(){
//while(1){
PING_PORT = 1;
delay_us(PING_ON_DELAY);
PING_PORT = 0;
delay_us(PING_OFF_DELAY);
PING_PORT = 1;
delay_us(PING_ON_DELAY);
PING_PORT = 0;
delay_us(PING_OFF_DELAY);
PING_PORT = 1;
delay_us(PING_ON_DELAY);
PING_PORT = 0;
delay_us(PING_OFF_DELAY);
PING_PORT = 1;
delay_us(PING_ON_DELAY);
PING_PORT = 0;
//delay_us(PING_OFF_DELAY); }
}
#define interrupt_on() PIR1 = 0x00; PIE1 = 0x04; INTCON = 0xC0
#define interrupt_off() INTCON = 0x00;
unsigned char pokupio;
unsigned char skupljaj;
unsigned int T1; //timer1 overflow
unsigned long T1_old;
unsigned long T1_new;
unsigned char bafer[25];
#define vd() Vdelay_ms(100)
#define blink() Vdelay_ms(100)
void Init(){
//init ports
ADCON0 = 0;
ADCON1 = 0;
ANSEL = 0;
ANSELH = 0;
TRISC = 1<<5; //RC5 is CCP1
PORTC = 0;
TRISB = 0;
PORTB = 0;
TRISA = 0;
PORTA = 0;
//init variables
pokupio=0;
skupljaj=0;
T1 = 0;
//init interrupts, timers
CCP1CON = 0x05; // 0000 0101 Capture mode every rising edge
T1CON = 0x01; // 00 00 (prescaler 1:1) 000 1(turn on the timer1)
T1_old = 0;
T1_new = 0;
//USART
Usart_Init(9600);
blink();
Usart_Write(0x0D);
Usart_Write(0x0A);
}
#define BAR0() PORTA.F2=1; PORTB |= 0x50; PORTC |= 0xDF
#define BAR1() PORTA.F2=0; PORTB |= 0x50; PORTC |= 0xDF
#define BAR2() PORTA.F2=0; PORTB |= 0x50; PORTC |= 0xDE; PORTC.F0=0
#define BAR3() PORTA.F2=0; PORTB |= 0x50; PORTC |= 0xDC; PORTC &= 0xFC
#define BAR4() PORTA.F2=0; PORTB |= 0x50; PORTC |= 0xD8; PORTC &= 0xF8
#define BAR5() PORTA.F2=0; PORTB |= 0x40; PORTB.F4 = 0; PORTC |= 0xD8; PORTC &= 0xF8
#define BAR6() PORTA.F2=0; PORTB &= 0xAF; PORTC |= 0xD8; PORTC &= 0xF8
#define BAR7() PORTA.F2=0; PORTB &= 0xAF; PORTC |= 0xC8; PORTC &= 0xE8
#define BAR8() PORTA.F2=0; PORTB &= 0xAF; PORTC |= 0xC0; PORTC &= 0xE0
#define BAR9() PORTA.F2=0; PORTB &= 0xAF; PORTC |= 0x40; PORTC &= 0x60
#define BAR10() PORTA.F2=0; PORTB &= 0xAF; PORTC &= 0x20
void prikazi(unsigned long x){
if ( x > 256){
Usart_Write(0xff);
Usart_Write(0xff);
BAR0();
vd();
return;
}
//posalji dva puta posto nekada receiver proguta prvi bajt
Usart_Write(x & 0xff);
Usart_Write(x & 0xff);
if (x < 15) { // near
BAR10();
}else if (x < 20) {
BAR9();
}else if (x < 25) {
BAR8();
}else if (x < 30) {
BAR7();
}else if (x < 35) {
BAR6();
}else if (x < 40) {
BAR5();
}else if (x < 45) {
BAR4();
}else if (x < 50) {
BAR3();
}else if (x < 55) {
BAR2();
}else if (x < 60) {
BAR1();
}else{
BAR0();
}
vd();
}
void main(){
unsigned long daljina;
Init();
daljina = 0;
pokupio = 0;
while(1){
interrupt_off(); //should be off already but for just in case
Vdelay_ms(200);
skupljaj = 1;
T1 = 0;
T1_old = (TMR1H << 8) | TMR1L;
T1_new = 0;
ping();
interrupt_on();
prikazi(daljina); //ovo traje neko vreme
interrupt_off();
if (pokupio){
pokupio = 0;
// 8MHz crystal so 2000000 ticks in second
// speed of air at 20deg 340m/s
// noTicks * 340 / 2000000 = double distance in m
// (noTicks * 340 / 2000000)*100/2 = distance in cm
// distance in cm = noTicks * 34 / 4000 = noTicks *17/2000
if (T1_new < T1_old){ //greska, odsjaj sa strane ili tako nesto
//nothing1();
continue;
}
daljina = T1_new - T1_old;
daljina *= 17;
daljina /=2000;
} else {
daljina = 32000;
//nothing();
continue;
}
}
}
void interrupt(){
if (PIR1 & (1<<TMR1IF)) { // timer1 overfow
PIR1 &= ~(1<<TMR1IF); // clear timer1 interrupt flag
T1++;
}
if (PIR1 & (1<<CCP1IF)) { // we captured the echo
PIR1 &= ~(1<<CCP1IF);
if (skupljaj){ // if we were waiting for the echo
skupljaj = 0; //we do not expect another one
pokupio = 1;
T1_new = (T1 << 16) | (CCPR1H << 8) | CCPR1L; // on capture TMR1x is copied into CCPR1x
}
}
}
EDIT: source je u MikroC-u ali mozes u bilo cemu da ga nacukas, prilicno je jednostavna filozofija