Pozdrav ljudi
nije me dugo bilo ali to neznači da nisam vredno radio i učio,..
evo već danima se, da kažem igram sa step motorima
dosta tog sam skontao ali me neke stvari zbunjuju
odmah da kažem da su to steperi povađeni iz raznoraznih uređaja, žao mi bilo baciti ih,..
konkretno me zanima,
steper bipolarni koji ima 24 koraka, kojom max. brzinom može da se vrti
prilažem kod pa vas ujedno i molim da protumačite greške ukoliko ih ima i da mi date neki savet kako bolje
motorić super radi sve dok mu nesmanjim vreme ispod 10 ms e onda jednostavno samo "drhti"
ali i kad radi nekako mi je mala brzina ima nekih stotinak rpm
Code: '******** VEŽBA KORAKA *******
start:
high PORTB.0
korak VAR WORD
sekvenca VAR byte(4)
provera:
if porta.3 = 1 then
korak = korak + 1
else
korak = korak - 1
endif
portB = sekvenca[korak //4]
pause 10
GoTo provera
[ rsinisa @ 04.04.2009. 18:42 ] @
Dak šemu drajverskog dela, znači od PIC-a do motora, nešto mi sumnjivo, ali da ne pričam napamet.
Pozdrav.
Sinisha
[ mradomir @ 04.04.2009. 18:48 ] @
Ako vrti softver ti je verovatno OK.
A to što na većoj brzini preskače je sasvim normalno
jer sa povećanjem brzine opada momenat.
Koji ti je napon napajanja i kako si izveo driver?
Da li imaš ograničenje struje?
Iz mojih pitanja možeš i da izvučeš odgovor gde
verovatno grešiš.
[ barum @ 04.04.2009. 21:02 ] @
Što se koda tiče, jedini način da se iz njega poveća moment je da se koriste istovremeno obe faze:
[quoteŠto se koda tiče, jedini način da se iz njega poveća moment je da se koriste istovremeno obe faze:[/quote]
Ili da koristi chopper, mozda on samo spoji na 5-12 V.
[ pelctronics @ 04.04.2009. 21:45 ] @
Predpostavljam da si poveza taster na porta.3?
Promenjiva "korak" kad nije pritisnut taster ostaje zaglavljena i vrednost se " vrti u krug" do maximuma pa ispocetka.
Probaj da da dodas jos 1 taster kojim bi umanjivao vrednost
provera:
if porta.3 = 1 then
korak = korak + 1
else
korak = korak - 1 <<<<<
endif
Pozdrav ;)
[ lm741 @ 04.04.2009. 23:24 ] @
uf,..jako mi je žao što nisam bio tu, nešto je iskrslo ali evo me,...
šema je vrlo jednostavna,..
vozam ga sa četiri pina pica 16fr84
portb.0
portb.1.......zaduženi su za prvi H most
portb.2
portb.3.......zaduženi za drugi H most
napajanje H-mosta je 12 v
napajanje pica standardno 5 v
na portua.3 dok je stanje 0 ide u jednom smeru
kad je stanje na portub.3=1 menja smer,
to sam stavio da bi bio siguran prilikom promene smera, da jednako radi i u drugom smeru
portovi pica direktno otvaraju tranzistore BD...(možda je tu greška, možda je potreban darlington,..)
nisam hteo da stavljam ULN 2803, žao mi bilo da ga spržim ako pogrešim pa sam napravio dva H mosta
u principu besprekorno radi samo mi je mala brzina, možda je to OK. pa vas zato pitam
kada ga vozam korak po korak, super je ali povećavanjem brzine dostignem maksimum, pa se pitam dali je to OK.
prvi put se susrećem sa step motorom a svakodnevno sa asinhronim kaveznnim motorima Što i nema sličnosti pa me to sad zbunjuje
jer očekujem da step motor može da prati brzinu promene stanja na H-mostovima
nekada negde sam video da se steper vrti poprilično,.......od čega to zavisi,...dali od broja koraka???
hvala vam svima na odgovorima i eto očekujem da čujem vaše mišljenje i iskustvo
[ barum @ 04.04.2009. 23:56 ] @
Citat:
Almedin:
Ili da koristi chopper, mozda on samo spoji na 5-12 V.
Da, chopper bi mogao da da pet do deset puta bolje performanse ali je isto toliko komplikovaniji za pravljenje. Treba iscrpeti prvo sve softverske opcije. Još jedna softverska bi bila implementacija ramping-a. Znači umerena počena brzina sa postepenom gradacijom do potrebne.
A pazi sad ovo, kad se pritisne taj taster javlja se duplo opterećenje u suprotnom pravcu. Neki bolji steperi sa izuzetnim drajverima bi možda još i mogli da ukoče u jednom koraku i da u narednom promene smer ali ovako bez kočenja makar u jednom koraku nikako. Ovo jednostavno oduzima polovinu ukupne performanse.
Citat:
if porta.3 = 1 then
korak = korak + 1
else
korak = korak - 1
endif
Takođe, upotreba delay-a za kontrolu brzine je pogrešna. Trebalo bi se koristiti nešto čija preciznost ne opada sa povećanjem brzine a poželjno bi bilo da preciznost raste čak eksponencijalno ako je moguće. Ovako, sa 10 na 9 milisekundi brzina skače za 11% a sa 9 na 8 milisekundi brzina skače za 12,5% a kad bi se prelazilo sa 8 na 7 to je 14,3% skok. Dakle kako raste brzina bilo bi poželjno da relativni skokovi budu makar jednaki, a ako se smanjuju pomogli bi da se izvuče najveća ostvariva brzina.
[ lm741 @ 05.04.2009. 00:14 ] @
instrukcija IF meni služi samo za proveru stanja na pinu RB.3
sve dok je neko stanje 1 ili 0 zauzima jedan sme, kome je identično stanje i u suprotnom smeru,..
čini mi se da nemam tu probleb
evo na prime, danas ceo dan motorić vrti u jednom smeru bez ikakvog grejanja bilo čega,..na onih 10 ms gde je i max.
u dilemi sam dali taj motoeić sa tim brojem koraka može dati više ili je to maksimalna brzina
što se tiče snage zadovoljan sam,...to je iz mog ugla eksperimenta sasvim ok. samo,
znači zanima me dali sam ja pogrešio negde ili taj motor nemože da se vrti brže zato što ima puno koraka pa je to njegov maksimum
na žalost, nemam motor sa manje koraka pa da probam
@barum
kada stisnem taster motorić istog momenta promeni smer i potpuno jednako radi
struja koju vuče motorić je oko 350 mA
[ lm741 @ 05.04.2009. 00:44 ] @
evo sada sam puštao sa obe faze istovremeno kao što je barum rekao
značajno sam dobio na snazi ali obrtaji,...
probao sam sa 9 ms,..8ms,..
na osmici je značajno gubio korak,...
bojim se da ću ipak sam sebi dati odgovor, da mu je to maksimum na 10 ms
[ veselinovic @ 05.04.2009. 08:19 ] @
LM a da ti ipak okacis semu, kao sto ti je Sinisa predlozio. I meni lici na hardversku gresku.
Ako budes kacio semu izmjeri makar omski otpore namotaja.
Ukoliko se BD ne grije onda ne treba darlington, jer ocito PIC moze da zasiti BD.
[ Almedin @ 05.04.2009. 08:49 ] @
Citat:
barum: Da, chopper bi mogao da da pet do deset puta bolje performanse ali je isto toliko komplikovaniji za pravljenje. Treba iscrpeti prvo sve softverske opcije. Još jedna softverska bi bila implementacija ramping-a. Znači umerena počena brzina sa postepenom gradacijom do potrebne.
Nije bas toliko komplikovano uz L297/L298, skuplje jeste. Mislite da se softverskim poboljšanjima može makar približiti chopper-u?
Citat:
veselinovic: LM a da ti ipak okacis semu, kao sto ti je Sinisa predlozio. I meni lici na hardversku gresku.
Ako budes kacio semu izmjeri makar omski otpore namotaja.
Ukoliko se BD ne grije onda ne treba darlington, jer ocito PIC moze da zasiti BD.
Zašto mislite da je u pitanju greška? Je li mislite ili znate iz iskustva da bi takav motor trebao ići brže ako se napaja sa 12 V? Pitam zato što sam i ja radio nešto tako i sistem se ponašao kao kod lm741, ne znam tačno koliko brzo je išao ali mislim da nije mogao postići ni 10 ms po koraku za motor od 24 koraka po obrtaju. Isprobao sam par motora, oni sa 200 koraka su, normalno, išli brže po koraku ali po obrtaju ne.
[ guja011 @ 05.04.2009. 09:42 ] @
treba ganjati strujom a ne naponom.
u tom smislu je potrebno znati koji je konkreno motorić u pitanju i šta mu treba.
[ lm741 @ 05.04.2009. 10:17 ] @
PCB sam radi u protelu bez sch
sada ću nacrtati i sch pa kačim
zanimljivo mi je to da na motorima pored gomile podataka nevidim podatak o max. brzini koraka ili rpm, ili to ja ne umem da protumačim
imam dva,naizgled dosta slična motorića koji se jednako ponašaju
prvi:
ROTARY DIGITAL ACTUATOR
TYPE MSCE048A69 2220
PHASE 2 VOLT 24 OHM 5
Sankyo JAPAN
drugi:
BERGER LAHR
RDM 57 12 G 345 mA
OHM 30 VOLT 10
W-Germany
odoh da crtam sch pa se javljam
[ lm741 @ 05.04.2009. 10:31 ] @
evo je šemica
[ mradomir @ 05.04.2009. 11:11 ] @
Sa ovom šemom, bez regulacije struje, si postigao maksimum
na ovim motorićima.
[ korak @ 05.04.2009. 11:16 ] @
Step motor karakterise to da se iz stanja mirovanja rotor zaokrene za neki ugao pa ponovo stane. Ako se frekvencija promena faza povecava, smanjuje se vreme stajanja rotora, i kada to vreme postane 0, step motor radi kao sinhroni motor. U tom slucaju, ako rotor ne moze da prati obrtno magnetno polje, eto greske. Dakle, ne treba dovoditi step motor u stanje da radi kao sinhroni motor, cak ni na granici jer zavisno od mehanickog opterecenja izrazenog kroz moment koji motor mora da savlada moze doci da njegov rotor ne prati obrtno magnetno polje.
Moze se povecati brzina, ali i smanjiti moment koji motor moze da savlada, ako se propusti svaki drugi korak tako da za jedan krug motor nema n koraka, vec n/2 koraka. Ovo nisam probao do sada, ali ako se trenutno bavis time probaj.
Pozdrav.
[ lm741 @ 05.04.2009. 11:16 ] @
evo i ručno sam nacrtao samo osnovu,
nadam se da je dovoljno jasna sema
piconja se nalazi na protobordu, h mostovi na pločici i sve to povezano žicama
H most napajam iz malog akumulatora 12 v a pica standardno sa 7805 da sad sve to necrtam
meni sve to super fercera samo mi je nejasno za brzinu koraka
ako je to maksimum onda je ok.
[ lm741 @ 05.04.2009. 11:27 ] @
@korak
ne znam kako da izvedem svaki drugi korak, kako to da dobijem
cilj ovog mog eksperimenta je da se upoznam sa steperima
na osnovu čega vi procenjujete neki steper kada vam se nađe na stolu
kako znate koje su mu mogućnosti ili taj neki maksimum
[ pelctronics @ 05.04.2009. 12:12 ] @
Prokomentarisi malo kod...nije mi bas najjasniji.
Gde i kako povecavas brzinu motora?Trabalo bi vremenskim intervalom ?
Pozdrav :)
[ lm741 @ 05.04.2009. 12:20 ] @
nakon jedne sekvence program pravi pauzu od 10 ms......to je ono dole ...pause 10
što je vreme pauze veće to je i sledeći korak ili sekvenca kasnija
znači kada bi stavili
pause 1000
svaki sledeći korak bi nastupio nakon jedne sekunde
[ _str_ @ 05.04.2009. 13:08 ] @
Problem moze biti H most jer je NPN vezan sa zajednickim kolektorom pa ce na emitoru preslikavati napon baze, u ovom slucaju 5V.
[ barum @ 05.04.2009. 13:45 ] @
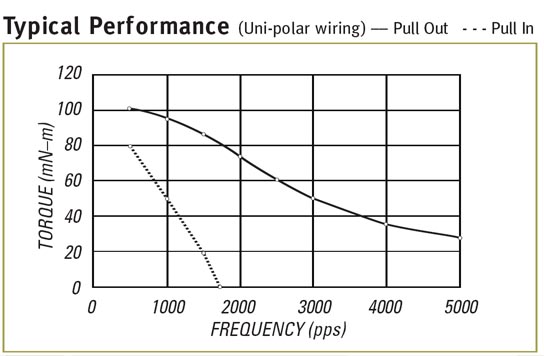
Za stepere nikad nećeš pronaći njihovu maksimalnu brzinu kao podatak. To se u dokumentaciji daje uvek kao grafik zavisnosti momenta od broja koraka u jedinici vremena. Kada brzina raste raspoloživi moment opada.
Steperi sa većim brojem koraka su sporiji ali precizniji. Ja sam neke od 200 koraka uspeo da nateram maksimalno 4000 koraka u sekundi. Motor je 1A (4V) 0.1Nm, drajver je L297 L298, napajanje 42V, frekvencija čopovanja 22KHz. U dokumentaciji za motor je grafik pokazivao karakteristiku do 5000 koraka u sekundi.
Strmina penjanja struje kroz namotaje, osim čopovanjem, može se poboljšati upotrebom napajanja sa višestrukim naponom i serijski vezanim neinduktivnim otpornikom za ograničenje struje. Ovo nije naročito efikasno što se iskorišćenja tiče ali je efektivno.
[ lm741 @ 05.04.2009. 17:19 ] @
Bojane hvala ti za odgovor kao i svim ostalim učesnicima,to je to,..
sad samo preostaje vreme da se upoznajem sa steperima
hvala vam puno što ste mi pomogli da razjasnim dilemu,..
[ rsinisa @ 05.04.2009. 21:51 ] @
Nisam neki expert za stepere, radio sam malo sa njima, a ovih dana pravim neke drajvere sa L297/L298. Prvo, što ti je već savetovano, idi na choper, to bi trebalo da pomogne. Kao drugo, koliko ja vidim tebi je u stanju mirovanja uvek otvoren PNP tranzistor što nije dobro. Pogledaj PDF za L297 i videćeš da se tamo generiše inhibit signal za slučaj koji ti navodiš kako bi struja što pre opala. U svakom slučaju preporučujem da probaš sa L297/L298 i značeš na čemu si. Meni tih 100-tinak koraka u sekundi koje dobijaš deluje premalo.
Pozdrav.
Sinisha
[ bogdan.kecman @ 06.04.2009. 06:12 ] @
ne volim da solim pamet ali .. A3982 je po meni mnogo bolje resenje od l297+l298 (i jeftinije - kada resis problem kako da ga dobavis u svojoj zemlji) .. pogledaj data sheet kada ugrabis minut vremena: http://www.allegromicro.com/en...cts/Part_Numbers/3982/3982.pdf
Alegro A3982 kosta ispod 4$ a menja i 297 i 298 od kojih samo 298 kosta preko 6$ u najboljem slucaju, za razliku od 298 koji ima voltage drop od 1.5V u maximalnoj saturaciji, alegro ima voltage drop od 0.4V sto znaci da se mnooooooooogo manje greje
edit: da ne bude skroz off topic, sada sam probao jedan 297/298 kontroler sa 200 koraka motorom (sure step - onaj najmanji) i vrti se na 900Hz bez problema - dakle 900 koraka u sekundi, ako upalim "half step" onda 2.3KHz ... pritom nisam ni blizu pustio 2A kroz motor (na toliko je projektovan - al me mrzelo da jurim trafo samo sam ga nabo na 12V) sto znaci - moze mnogo brze ... e sad, ako ga upalim na 900Hz nece da se mrdne :D ali ako ga ubrzas sa 500Hz na 900Hz se vrti vrlo lepo :) ... (koristio sam function generator da dovedem drive impulse na 297)
[ rsinisa @ 06.04.2009. 17:15 ] @
Davanje korisnih informacija nikako nije soljenje pamet, naprotiv, vrlo je poželjno. Gledah sad Farnell, ako se dobavi od njih na komad izadje ovde oko 4,6 EUR što je opet povoljnije nego L297 + L298 kod izvesnog domaćeg dobro poznatog prodavca. Kad smo već kod zamena za L29x par, postoji li neka integrisana varijanta za više od 2A?
Pozdrav.
Sinisha
[ bogdan.kecman @ 06.04.2009. 17:59 ] @
pitanje koliko je korisno .. ja na primer znam za
1. rucno otvaram i zatvaram rucno napravljen H bridge uC-om
2. rucno otvaram i zatvaram l298 uC-om
3. combo l297 + l298
4. nekoliko alegro cipova od kojih sam probao samo A3982 koji pritom ne mozes kupiti u ovoj zemlji (ne kapiram iz kog razloga posto je 297/298 kombinacija prilicno "out of date")
e sada to je DALEEEEEEEEEEEKO od kompletne slike i to jeste soljenje pameti posto
- zasto je A3982 bolji ako ne moze da se kupi kod nas
- sigurno ima jos bolje resenje za koje ja jos nisam cuo koje mozda moze da se kupi kod nas :)
lm, zato ja to zovem "soljenje pameti" i mrzim to da radim posto imam prilicno polovicne informacije - ali sam spomenuo A3982 posto sam ja progledao kada sam ga prvi put probao :D
L298 je bar deset godina starija tehnologija od Allegro rešenja. Postoje verzije sa mikrostepovanjem, integrisana je zaštita od pregrevanja, rešen problem zaglupljivanja zbog pikova na strujnim senzorima i pada frekvencije čopovanja u čujni opseg. Izlazni tranzistori su MOSFET koji imaju mnogo manje termalne gubitke nego bipolarni L298. Možda je mali problem za prototipsko projektovanje pakovanje za površinsku montažu ali ni trapezoidni raspored koji L298 ima ne dozvoljava ubadanje u prototipsku pločicu.
Dakle jedini pravi problem su naši dileri koji uglavnom imaju gomilu nekih drajvera i za te stepere i dok se to ne proda može tehnika da napreduje koliko joj drago. A onda sam ja razmišljao ovako, daj da uzmem to što može da se pronađe tu da vidim kako radi. A dok proradi možda izgorim neki komad. I onda, pošto proradi iz prve, pomislio sam to je to, odlično. Da, naročito nekom ko i nezna za bolje. A stvarno bih voleo veći izbor.
Da se malo vratim na priču o brzini. Kod grafa sa momentima postoje dve funkcije. Jedna je Pull-in a druga Pull-out moment. Pull in se još naziva i startujući moment i predstavlja maksimalni moment raspoloživ za započinjanje rotiranja na datoj brzini bez gubljenja koraka. Druga funkcija momenta, pull out, predstavlja moment kojim motor može da vrti opterećenje na određenoj stalnoj brzini bez gubljenja koraka.
Kod mehanike koju pogoni motor, iz ugla posmatranja preko momenta, postoji nekoliko komponenti koje različito zavise od brzine. Postoji prvo komponenta moment statičke frikcije koji treba da se savlada da bi se uopšte krenulo sa nule, zatim konstantna komponenta koja uopšte ne zavisi od brzine i dominira na manjim brzinama, zatim se zbog raznih trenja i drugih interakcija na većim brzinama javljaju razne linearno i eksponencijalno rastuće komponente koje konačno ograničavaju brzinu.
Ovo, prethodno opisano, ponašanje mehaničkog sistema je uglavnom očekivano ali kod stepera se javlja izluđujuća pojava rezonantnih učestalosti koja neke male brzine čini nemogućim. O čemu se radi. Na malim brzinama rotiranje se sastoji od uzastopnih mirovanja i prelaza u narednu fazu. Kada se promeni faza rotor pojuri ka sledećem koraku mnogo većom brzinom od prosečne i kako se približava položaju nagomilava kinetičku energiju sa kojom proleti preterano i zatim ga faza vuče nazad opet preleti i tako prigušeno izosciluje par puta dok se lepo ne poravnaju rotor i stator. Na određenim brzinama nova faza nastupa u trenutku kada se rotor već kreće u tom smeru i ima položaj pre potrebnog tako da će ka sledećoj fazi pojuriti sa povećanom brzinom i zbog toga imati veći prebačaj i oscilacije veće amplitude koje se svakim korakom uvećavaju dok ne izgubi potpuno korak i počne da osciluje u mestu oko jedne faze. Rešenje predstavlja smanjenje struje koja se pušta kroz motor za manje brzine ili upotreba mikrostepovanja.
[ grabik @ 09.04.2009. 08:37 ] @
Citat:
rsinisa: Nisam neki expert za stepere, radio sam malo sa njima, a ovih dana pravim neke drajvere sa L297/L298. Prvo, što ti je već savetovano, idi na choper, to bi trebalo da pomogne. Kao drugo, koliko ja vidim tebi je u stanju mirovanja uvek otvoren PNP tranzistor što nije dobro. Pogledaj PDF za L297 i videćeš da se tamo generiše inhibit signal za slučaj koji ti navodiš kako bi struja što pre opala. U svakom slučaju preporučujem da probaš sa L297/L298 i značeš na čemu si. Meni tih 100-tinak koraka u sekundi koje dobijaš deluje premalo.
Pozdrav.
Sinisha
Ako pravis drajver sa neta tipa palomino sajta ili kako se vec zove dodaj mu opciju kad motor stoji da ne ide max struja kroz njega samo 50%, a to ti omogucava da pokreces drajvere sa svim softverima, a takodje ako ide stalno kroz motore struja od 100% motori se vrlo brzo ugriju u radu ili ne mozes dobiti maksimalnu snagu ako smanjis struju kroz njih zbog grijanja motora.
Takodje maksimalna brzina i snaga zavisi i od softvera jer XP drzi hardver pod kontrolom pa imas oscilacije u duzini cetvrtki koje idu recimo na LPT port, sto ima direktno uticaja na brzinu i snagu motora.
Ja sam drajvere L297/L298 napravio davnih dana ali vise ih ne bi pravio, da idem na step motore pravio bih drajvere sa mikrokontrolerom.
Ti drajveri rade puno bolje i mirnije od kombinacije L297/L298, nisam testirao ove drajvere sa neta ali za gotove znam.
[ sasa979 @ 31.03.2012. 08:47 ] @
pozdrav svima,
imao bih jedno pitanje ,meni treba da smanjim brzinu najobicnijeg step motora iz stampaca ali bez drajvera ,elektronike i ostalih cuda,pa ako neko ima ideju,bio bih zahvalan
a da jos jedna stvar,ako uspem da smanjim brzinu,postoji li mogucnosta da mu uz neki potenciometar i povecam ili ti smanjkim istu
hvala unapred
[ shpiki @ 31.03.2012. 10:01 ] @
Iskopao si temu od pre 3 god... ali nema veze...
Bez drajvera tesko da ces moci i da "teras" steper, a ne da mu menjas brzinu kako tebi odgovara...
Ako planiras da smislis "nesto" sto bi pogonilo taj steper, a da pritom ne zelis da ga nazivas drajverom, jedino ti za menjanje brzine ostaje prenos (veci ili manji, zavisno od brzine koju zahtevas), ali tu automatski otpada potenciometar (iz drugog dela pitanja)...
Pozdrav.
[ sasa979 @ 31.03.2012. 23:01 ] @
zahvaljujem na odgovoru shpiki uspeo sam da resim problem pomocu prenosa tj kais i zupcanici
hvala jos jednom
pozdrav
[ djbocko @ 22.01.2015. 19:42 ] @
He, evo i mene posle par godina :-)
U vreme kad ste čukali o ovome ja sam se bavio izradom svoje CNC mašine, softvera i elektronike.
U početku sam nailazio na iste probleme. Ja sam pokušavao sa AT mikrokontrolerima da vozim najmanji unipolarni NEMA23 1,8 stepeni i td, ali sam tek ovih dana provalio mnogo bitnu stvar.
Sa AT je išlo fino i precizno bez promene ubrzanja ali sam od toga odustao i od kontrolera napravio nešto drugo. Motore sam cepao direktno na LPT port sa laptopa, naravno sa MOS-N-FET trandžama(IRF530 i IRF 1404). Ovaj drugi je bolji jer ima manji otpor Gate-Source ali je skuplji. LPT i sad gura te motore a razlog što ga koristim je taj što direktno pišem u Windows-u šta treba da radi nego tamo-ovamo pa upiši pa prebacuj kontroler i td.
Pošto se radi o unipolarnim motorima (zajednički plus) motore vodim sa po 2 faze i to prvi i poslednji koraci imaju direktno podešavanje u mom WIN programu i ovako otprilike izgleda:
- 0000
- 0001
- Početni korak(usleep[1]) - Pull-in
- 0011
- Nomalni korak(usleep[2])
- 0111
- 0110
- Nomalni korak(usleep[2])
- 1110
- 1100
- Nomalni korak(usleep[2])
- 1101
- 1001
- Nomalni korak(usleep[2])
- 1011
- 0011
- Nomalni korak(usleep[2])
- 0010
- Završni korak(usleep[3]) - Pull-out
- 0000
Za svaku sledeću I/O komandu prvo ide ON pa OFF za prethodnu, kao što sam napisao gore.
Problem kod većih brzina, npr.preko 6 RMP(1200 koraka) je što motor gubi snagu-moment ali zašto. Merenjem ukupne struje kod manjih i većih brzina vidi se razlika, npr. sa LPT pobudom na 100 koraka je oko 3,5A a, kod 400 koraka 1,5A a kod 1000 koraka 0,4A. Pri svakoj brzini isto je vođenje faza(I/O) po čemu sam odmah zaključio da je problem u brzini okidanja od 0 do 5V(latenca porta ali i tranzistora), ali i to što se tranzistor pobuđuje na 3,2 volta(Gate Treshold). Tu sam nekako povećao razliku napona na gejtu i sada je 2,4V umseto 0V kada je na pinu 0V, a 7,4V umesto 5V kada je na pinu 5V. To sam uradio da bih smanjio tu tkz-latencu odnosno pre pobuđivao MOSNFET i to važi i za mikrokontrolere koje programiraš. To je vrlo bitno, kao i programsko vođenje I/O (prvo uključiti novi pin a zatim isključiti stari, pa onda na sleep). Takođe je bitno da unipolarni motor uvek furaju 2 faze. Još uvek mi nije jasno zašto se smanjuje struja povećanjem brzine kada su uvek prisutne 2 faze.
Toliko od mene. Ako neko može da objasni kako najlakše da uradim taj Čoper bio bih veoma zahvalan.
Pozdrav.
[ ZAS011 @ 23.01.2015. 04:40 ] @
Ako hoćeš da ti se motori brže vrte sa manjim gubitkom momenta, čoperska regulacija struje je NEOPHODNA. Nije toliko bitan napon već STRUJA kao i brzina dI/dt.
pročitaj malkice na geckodrive.com šta je Mariss napisao vezano za stepper-e.
Ukratko što viši napon sa limitiranjem MAX struje (time se dobija visoka strmina prirasta struje u jedinici vremena - dI/dt, pošto je stepper induktivna zvrčka).
[ bogdan.kecman @ 23.01.2015. 05:00 ] @
Citat:
djbocko: Još uvek mi nije jasno zašto se smanjuje struja povećanjem brzine kada su uvek prisutne 2 faze.
struja ti se smanjuje zato sto
- ne otvaras gate feta dovoljno brzo
- nemas kontrolu struje nego napona
- imas back emf sa motora koji ti se suprotstavlja tvom naponu
prvo i osnovno ovo sto ti zoki kaze - motori se voze strujom, ne naponom i dI/dt na motoru je ultra bitan, da bi imao veliki dI/dt na motoru moras da imas mnogo brze fetove, odgovarajuci napon etc etc
drugo, steper motori po svojoj eletrkomehanickoj konstrukciji imaju manji torque na vecim brzinama, dakle cak i kada odradis sve idealno njemu torque pada sa brzinom, ako ti treba veci torque na vecoj brzini mora guras servo motor a ne steper
kako da napravis copper, najjeftinije ti je kupis ALEGRO drajver koji to ima u sebi, kosta mnooogo manje nego da pravis sam. za manje struje imas drajver sa ugradjenim fetovima a za vece struje uzmes drajver sa externim fetovima
[ djbocko @ 23.01.2015. 17:42 ] @
Hvala na odgovorima.
Pošto već imam fetove na izlazu(IRF530 i IRF1404), čak su jači nego što je potrebno i uvek su hladni i napajam ih sa 12V, struju bih mogao povećati samo uz povećanje napona napajanja, npr.na 36V. Jer, svi motori rade na oko 500Hz tj. 2,5RPM i svaki od njih prilikom rada troši oko 0,5A na 12V Ako bih povećao na 36V trebalo bi da da troše oko 1,5A po Omovom valjda. To bi trebalo da znači da ako sada imaju snagu od 6W onda sa 36V bi imali po 54W i tada bih mogao još da ih ubrzam. Jel tako bogdan.kecman i ZAS011 ?
Pozdrav.
[ ZAS011 @ 23.01.2015. 18:09 ] @
Samo sa MOSFET-ima koji su direktno priključeni na LPT nećeš mnogo dobiti. Koliko vidim čak nisu ni Logic Level
Kod stepera se na priča o Vatima već o momentu i brzini, i BTW, za induktivne potrošače, omov zakon ne važi baš tako kako ti misliš.
[ bogdan.kecman @ 23.01.2015. 18:55 ] @
Citat:
djbocko:
napajam ih sa 12V
sta napajas sa 12V? gate ili fetovima prekidas 12V liniju?
Citat:
djbocko:struju bih mogao povećati samo uz povećanje napona napajanja, npr.na 36V. Jer, svi motori rade na oko 500Hz tj. 2,5RPM i svaki od njih prilikom rada troši oko 0,5A na 12V Ako bih povećao na 36V trebalo bi da da troše oko 1,5A po Omovom valjda. To bi trebalo da znači da ako sada imaju snagu od 6W onda sa 36V bi imali po 54W i tada bih mogao još da ih ubrzam. Jel tako bogdan.kecman i ZAS011 ?
Pozdrav.
Jok, nije ni blizu tako!
realno zaboravi takvu racunicu, ne radi. Prvo imas Rdson na tim fetovima koji zavisi od toga cime ih otvaras, ako je zokijeva pretpostavka da ih otvaras sa lpt porta tacna tu je vec kraj price, oni ti pojedu svasta vec u startu ... dalje rekoh ti imas napon koji ti se vraca sa motora koji ti se suprotstavlja tako da ne mozes da racunas obican omov zakon .. tu ide vrlo jednostavan koncept
- MERIS struju kroz coil
- u odnosu na izmerenu struju menjas napon kroz coil da bi dobio zeljenu struju
i to je to .. dal ces taj napon da menjas linearno (opamp i neki bjt) ili ces da pravis copper to vec zavisi od tvog umeca ali to je jedini nacin da imas max torque koji taj motor moze da izvede ..
[ djbocko @ 24.01.2015. 13:31 ] @
Citat:
bogdan.kecman: sta napajas sa 12V? gate ili fetovima prekidas 12V liniju?
Napajam fetove.
Citat:
bogdan.kecman: ako je zokijeva pretpostavka da ih otvaras sa lpt porta tacna tu je vec kraj price
Jesi li nekad radio nešto sa LPT portovima?
Nađoh slučajno neki punjač za baterije od 32V DC u sekundaru i probao ga umesto onih 12V. Ispostavilo se da važi Omov zakon ali bez ikakve prethodne promene brzine motora tj.frekvencije.
Odmah sam počeo da povećavam brzinu i verovali ili ne sa dosadašnjih 2,5rps (500Hz) ubrzao sam ga do 6,25rps (1250Hz). Pri toj rotaciiji ima veći obrtni moment od onog sa 12V i 2,5rps. Međutim, javljaju se drugi problemi: pri toj brzini motor ponekad ne može da startuje i ne zaustavlja se u predviđenom koraku.
Trenutno razrađujem logaritamsku funkciju koja će uvoditi i izvoditi motor iz te brzine.
Dakle, rešenje je povečanje napona na ulazu u motor, ali tada motor ne treba voditi manjim brzinama pošto troši više struje nego što je potrebno i zagreva se. Zato kolege predlažu čoper koji ima funkciju stabilizacije struje da se ovo ne bi dešavalo. Ja neću praviti čoper jer motore neću voditi malim brzinama.
Moje viđenje stvari je ovako:
Slika gde je obeleženo šta je važno za unipolarni step motor: Slika
1. Duplo vođenje faza(obavezno)
2. Početni impuls u koraku (5ms; centriranje položaja rotora pre početka okretanja - jedna faza)
3. Početno vreme prvog koraka (prvi korak traje 2,5msec zatim LINEARNO ubrzavanje - dve faze)
4. Trajanje koraka (korak traje 0.8msec - dve faze)
- sledi LINEARNO usporavanje rotora do početnog trajanja impulsa (tačka 2 - takođe dve faze)
5. Zaustavljanje motora (trajanje zaustavnog koraka 5msec - jedna faza)
Naravno, upisana vremena variraju u zavisnosti od karakteristika step motora. Moji su Single Length NEMA23 6V 1A/phase, veoma stari, i odlično rade sa ovim parametrima na 32V, a gone ih fet tranzistori IFR530. Ako nekome treba još neka informacija ili C# i C++ source tu sam.
Pozdrav,
[ bogdan.kecman @ 24.01.2015. 14:15 ] @
Citat:
djbocko: Jesi li nekad radio nešto sa LPT portovima?
naravno zato i kazem, napon sa lpt-a nije dovoljan da otvori taj fet dovoljkno a struja koju lpt port moze da da na pinu nije dovoljna da napuni gate dovoljno brzo .. sve u svemu bez fet drajvera izmedju lpt-a i feta ili bar da koristis neke logic leve fetove to nece da radi optimalno
Citat:
djbocko:
Nađoh slučajno neki punjač za baterije od 32V DC u sekundaru i probao ga umesto onih 12V. Ispostavilo se da važi Omov zakon ali bez ikakve prethodne promene brzine motora tj.frekvencije.
omov zakon uvek vazi, problem je sto ti promenom brzine imas dodatne momente koji zahtevaju neke druge formule (za pocetak kikrofa)
i dalje ti motor vuce vise struje kad ide sporije nego kad ide brze. povecavanjem napona povecava se i jedna i druga struja, da bi terao na vecoj brzini taj motor njegovom max strujom na maloj brzini ce motor da izgori. dakle ako hoces od pocetka do kraja da vozis motor sa max njegovim torqueom moras da menjas napon. dakle izveo si pogresne zakljucke iz svog experimenta
[ djbocko @ 25.01.2015. 17:06 ] @
Gosp. bogdan.kecman ,
Ja mislim da ti nisi razumeo ili nisi pročitao sve što sam napisao u postu a već si krenuo sa komentarima. Nisi rekao ništa što nisam znao, samo si me ponovio.
Kao prvo LPT je dovoljno brz i jak, da ne kažem prejak, za navedene fetove. Da nije tako fetovi bi se grejali zato što ne zatvaraju DS u predv.intervalima, a oni su zapravo hladni kao led. Taj port ima baud rate od 150kbit/s a to je više nego dovoljno za "koračanje" step motora. Samo adresiranje i CPU veza sa tim portom je bolja u pogledu na direktne kontrole preko drugih portova. Način na koji sam povećao brzinu otvaranja gejta takođe sam objasnio.
Drugo, meni nije potrebna mala već što veća brzina od tih motora i to sam već napisao. Za manje brzine mogao bih programski da uskladim PWM u saradnji sa brzinom tj.momentom motora, ali mi male brzine ne trebaju. To sam već imao pa sam zato tražio mišljenja na foromu kako da povećam brzinu i moment. Priznajem da mi na pamet nije palo povećanje napona iznad 12V tako da moram zahvaliti ZAS011, što mi je dao odličan i konkretak savet.
Lako je kupiti svu elektroniku i namontirati na mašinu ali ja nisam taj. Imaju Kinezi sve. Potrebno je da čovek nešto malo i nauči o načinu rada te mašine. Zato ovaj forum i postoji. Drugačije, odeš u prodavnicu ili WEB sajt i kupiš šta ti treba, šta će ti forum; return false;
Nisi ti prvi koji kaže da nešto ne može samo zato što tako misli ili ne zna drugačije. Ja svoju CNC mašinu kompletno guram iz Windowsa XP a puno njih mi je reklo da je to 100% nemoguće. Ona nekad radi i 20 sati a da motori ni jedan jedini korak ne preskoče. Neke mašine od po 2000-5000€ se vraćaju na 2-3mm od početne tačke posle samo par sati rada.
Zato sam opisao problem i rešenje da bih nekom bilo od koristi u samogradnji. I naravno izveo sam ispravne zaključke samo trebaš da pročitaš moj ceo post.
Pozdrav&hvala.
[ bogdan.kecman @ 25.01.2015. 17:52 ] @
Citat:
djbocko:
Ja mislim da ti nisi razumeo ili nisi pročitao sve što sam napisao u postu a već si krenuo sa komentarima. Nisi rekao ništa što nisam znao, samo si me ponovio.
bice da je obrnuto, nema veze, ako si zadovoljan kako ti radi super, samo pici
Citat:
djbocko:
Kao prvo LPT je dovoljno brz i jak, da ne kažem prejak, za navedene fetove.
LPT port ima 5V izlaz i moze da pustin nekih 20mA ako imas srece i stari lpt drajver, noviji vec na 10mA krecu da padaju na 4V
IRF530 je full otvoren na 10V a tek na 6.5V moze da dostigne svoj 5.5nC charge na Qg da bi radio kako treba, tako da ispod 6.5V realno ne treba da se koristi.
IRF1404 je takodje full otvoren na 10V stim sto mu je gate charge dosta veci (36nC ako se secam dobro) no on za struje do 7A moze da se tera sa 5V posto on moze da napuni gate vec sa 4.5V. Nece biti full otvoren ali ce biti otvoren dovoljno dobro i ako ti nije potrebna brza tranzicija nece se grejati, no radi na granici.
obzirom na cenu fet drajvera gurati IRF1404 na granici ili IRF530 ispod granice, cak i ako "tebi radi" je po meni lose, svakako je los primer drugima, jer nece raditi ni sa svakim tranzistorom ni sa svakim lpt portom.
zato sam ti rekao da stavis fet drajver izmedju lpt-a i fetova, no kao sto rekoh, ako ti radi i zadovoljan si samo napred, ne kontam onda zasto si postavio pitanje ako ti je vec sve jasno i sve ti radi onako kako zelis?!
Citat:
djbocko:
Da nije tako fetovi bi se grejali zato što ne zatvaraju DS u predv.intervalima, a oni su zapravo hladni kao led.
ti teras te motore dosta malom strujom a ti fetovi bez hladnjaka mogu da disipiraju 50W tako da to sto su hladni samo znaci da je disipacija na njima mala, ako ih klikces sporo, posebno 1404 koji se otvara na 4.5V ako ides dovoljno sporo, on se nece grejati, ako ti se 530 ne greje znaci da si zabo komad koji je u donjoj granici pa uspeva da napuni gate sa 5V iako datasheet kaze 6.5. To sto "taj komad" radi ne znaci da ce raditi svaki komad.
Citat:
djbocko:
Samo adresiranje i CPU veza sa tim portom je bolja u pogledu na direktne kontrole preko drugih portova.
lpt port je dosta zastarela tehnologija koja se danas vise ne koristi tako da to sto mozes starom lpt portu (novom ne mozes) da pristupis direkt pisuci po portu njegovog kontrolera je super stvar ali ne nesto sto ce raditi sutra tako da je super da nabudzis sebi na brzaka za nesto ali za neki ozbiljan razvoj je gubljenje vremena .. a i pisanje sw-a za lpt je pitanje koliko ima smisla pored linuxcnc-a koji to radi savrseno i daje mogucnost dograde na sve moguce nacine, ko zna da programira naravno, a ti valjda znas
Citat:
djbocko:
Drugo, meni nije potrebna mala već što veća brzina od tih motora i to sam već napisao.
da bi dostigao veliku brzinu moras da zavrtis motor iz stanja mirovanja "sporo" pa ga polako ubrzavas do zadate "velike" brzine. Dakle ti moras da prodjes od nula do zadate, te mora da prodjes kroz sporo. Zato moras da regulises struju kroz motor sve vreme a ako imas fiksni napon struja ce da bude velika u startu i padace kako raste brzina. Kako ces da regulises tu struju je vec tvoja stvar, mozes linearno mozes smps neki, u svakom slucaju ti treba constant current, ne constant voltage.
Citat:
djbocko:
Za manje brzine mogao bih programski da uskladim PWM u saradnji sa brzinom tj.momentom motora, ali mi male brzine ne trebaju. To sam već imao pa sam zato tražio mišljenja na foromu kako da povećam brzinu i moment.
pa max napon ti treba za max brzinu, a onda za sve ispod max brzine moras da smanjis taj napon da bi odrzao istu struju .. da li ces taj napon da pwm-ujes ili pravis neki drugi constant current drive sa nekim smps cipom, dakle potpuno analogno ili na neki peti nacin to je samo do tebe
Citat:
djbocko:
Lako je kupiti svu elektroniku i namontirati na mašinu ali ja nisam taj. Imaju Kinezi sve. Potrebno je da čovek nešto malo i nauči o načinu rada te mašine. Zato ovaj forum i postoji. Drugačije, odeš u prodavnicu ili WEB sajt i kupiš šta ti treba, šta će ti forum; return false;
Nisi ti prvi koji kaže da nešto ne može samo zato što tako misli ili ne zna drugačije. Ja svoju CNC mašinu kompletno guram iz Windowsa XP a puno njih mi je reklo da je to 100% nemoguće. Ona nekad radi i 20 sati a da motori ni jedan jedini korak ne preskoče. Neke mašine od po 2000-5000€ se vraćaju na 2-3mm od početne tačke posle samo par sati rada.
Zato sam opisao problem i rešenje da bih nekom bilo od koristi u samogradnji. I naravno izveo sam ispravne zaključke samo trebaš da pročitaš moj ceo post.
Pozdrav&hvala.
?! ja sam ti rekao
1. stavi fet drajver izmedju feta i lpt-a. fet drajver kosta nesto tipa dolar
2. napravi regulaciju struje kroz motor (eto sam si rekao mozes pwm-om, ja bi pre stavio neki smps cip ciji bi se feedback punio sa Rs ali moze i pwm)
3. rekao sam ti da je NAJJEFTINIJE da uzmes alegro drajver. To nije kineska plocica, to je jedan cip, komponenta, isto kao i taj FET sto si stavio nisi ga naparavao u kuhinji nego si ga kupio, tako kupis i alegro cip koji ima copersku kontrolu struje kroz motor sve sa mikrostepingom .. http://www.allegromicro.com/en...Motor-Unipolar-Driver-ICs.aspx imas 2phase, 3phase i 5phase pa biras .. ja licno unipolarne motore prevezem kao bipolarne i vozim ih tako, kada je to moguce, ako nije moguce ne uzimam ih uopste, bipolarni su po svim mojim testovima znacajno veceg momenta za istu masu*utrosenu energiju
sta od te tri stvari tebi znaci "nemoguce" ili batali da pravis sam idi kupi od kineza na web shopu?!
[ djbocko @ 25.01.2015. 19:46 ] @
Bogdane,
Ne znam gde čitaš podatke ali evo ti original sa ST linka:
1. Motor ne mora od nule da se zavrti, može u korak da krene sa npr.100-200Hz jer su njegov rotor i povezana šipka fi8 od 0,5m neosetni za njegov početni moment
2. Ne treba pobuda između LPT-a i fetova jer:
2.1 Gate feta IRF530 se otvara naponom od 2 do 4V
2.2 Gate feta IRF530 se otvara strujom od max 100nA, tako da LPT port njega i "ne oseća", tj.opterećenje pina porta je 0.5%
2.3 Vreme zatvaranja Drain-Source feta IRF530 sa disipacijom je 40nsec, tako da je disipacija tranzistora na 1kHz (5rps) vožnje motora tek 0.0041%
Toliko što se tiče tvoje tvrdnje da IRF530 ne "ume" da vozi. Gledaš podatke pogrešnog trandže ;) Link
Pozdrav.
[ bogdan.kecman @ 25.01.2015. 20:26 ] @
Citat:
djbocko: Ne znam gde čitaš podatke ali evo ti original sa ST linka:
gledah na irf.com to je originalno njihov fet, no evo gledam sad tvoj ST ovaj njihov kaze da mu je th 3V typical, to je duplo manje nego irf.com, zato ti i radi (doduse evo sad opet gledam irf.com i pise 2-4, ne kontam lepo sam malopre video 6V)
Citat:
djbocko
1. Motor ne mora od nule da se zavrti, može u korak da krene sa npr.100-200Hz jer su njegov rotor i povezana šipka fi8 od 0,5m neosetni za njegov početni moment
:D mora da krene od nule, ti mozes odma da krenes sa par rpm naravno ali motor krece iz nule i tih prvih par impulsa on ce da povuce max struju, i oce da izgore u tom ternutku ko blesavi, izgorelo mi je do sada bar 30 komada .. preteram sa naponom a ne znam tacno osobine motora (posto sam uzimao polovne dosta dugo) .. veruj mi znam sta pricam, proterao sam ovuda minimum 500 steper motora, sto onih malecnih nema 14 i nema 17, mnoooooogo nema 23 i dosta nema 32 .. ove vece sam slabo koristio
Citat:
djbocko
2. Ne treba pobuda između LPT-a i fetova jer:
2.1 Gate feta IRF530 se otvara naponom od 2 do 4V
2.2 Gate feta IRF530 se otvara strujom od max 100nA, tako da LPT port njega i "ne oseća", tj.opterećenje pina porta je 0.5%
2.3 Vreme zatvaranja Drain-Source feta IRF530 sa disipacijom je 40nsec, tako da je disipacija tranzistora na 1kHz (5rps) vožnje motora tek 0.0041%
ne slazem se. 2.2 i 2.3 su ok, 2.1 - ne, to je samo th voltage, znaci tada ce uopste da "krene da puni gate" ali ga nikako nece potpuno otvoriti.
iz tvog datasheet-a, na 5V Rds ti je 1.2oma dok mu je normalan Rds sa 12V na gejtu 0.11-0.13R iliti 10 puta manje. ne mozes me nikako ubediti da ti 1R2 na fetu nije mnogo i da ti je skupo da das pola evra za drajver i skines tih 1R2 na 0R1 ?! ... ako su to 3.5A motori koliko sam uspeo da zakljucim iz tvog posta (ili su ko zna sta a ti ih samo vozis sa 3.5A sporo na 12V) to znaci da ces cetvrtinu snage da ostavis na fetu.. iliti da bi odrzao istu struju kroz motor moraces jedno 30% da dignes napon vise nego sto bi to radio sa drajverom (od pola evra)
Citat:
djbocko
Toliko što se tiče tvoje tvrdnje da IRF530 ne "ume" da vozi. Gledaš podatke pogrešnog trandže ;)
ja i dalje tvrdim da sa lpt-a ne mozes korektno da vozis IRF530
da si uzeo recimo IRL6372 (kosta ~1eur sto je jeftinije od IRF530 koji je uglavnom 1.2-1.6eur) ne bih ti rekao da stavis mosfet drajver izmedju... ali 530 na zalost zahteva drajver ako ces da ga vozis sa 5V .. mislim, ne zahteva ali imas jos 1R2 koje treba da savladas
[ djbocko @ 25.01.2015. 21:14 ] @
Prijatelju, taj tranzistor je sa 4V na gejtu zatvoren sa otporom od 0.16 Ohm-a.
Citat:
bogdan.kecman: 2.1 - ne, to je samo th voltage
Jel znaš šta znači Gate Threshold Voltage?
Citat:
bogdan.kecman: ja i dalje tvrdim da sa lpt-a ne mozes korektno da vozis IRF530
Tvrdi ali nemoj mnogo. Ja vozim mali motor NEMA23 Single Length na 6,25rps (1250Hz) gde su tranzistori ledeni.
Jel hoćeš da snimim video da se uveriš?
Osim toga, sa ATtiny13 i 4xIRF1404(parallel) vozim elektrokart težine 80kg+moja težina, brzinom od 60km/h. Ti sad vidi.
[ bogdan.kecman @ 25.01.2015. 21:40 ] @
Citat:
djbocko: Prijatelju, taj tranzistor je sa 4V na gejtu zatvoren sa otporom od 0.16 Ohm-a.
[ djbocko @ 25.01.2015. 21:56 ] @
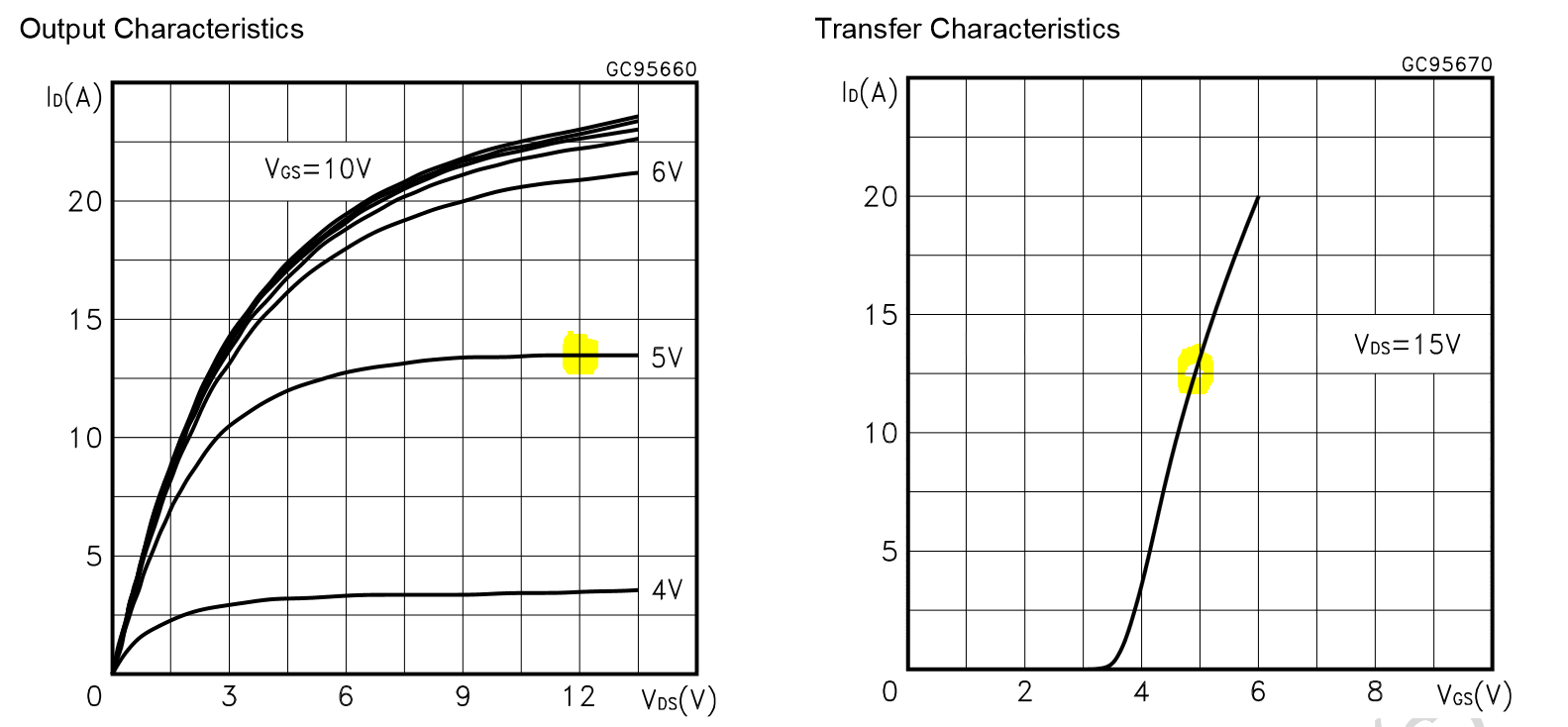
Pa jel znaš šta predstavljaju prvi i drugi dijagram i šta si uopšte obeležio?
[ bogdan.kecman @ 25.01.2015. 22:30 ] @
ja da ali da li si ti siguran da znas? to sto radis u saturation regionu ne znaci da je fet potpuno otvoren
[ djbocko @ 25.01.2015. 22:36 ] @
Pa reci šta predstavljaju tačke koje si obeležio.
[ bogdan.kecman @ 25.01.2015. 23:05 ] @
Vds = Rds(on) * Id za odgovarajuci Vgs, sto ce reci da je za tvoj Vgs od 5V i 12V Vds (rece da ga teras na toliko ne nebitno je, vece je od 9V) Id = ~13A te je Rds(on) oko 1R
e sad, jeste, ti si sa 12V za Vds i 5V za Vgs usao u saturation ali to ne znaci da je fet skroz otvoren, da jeste skroz otvoren Id bi bio isti za Vgs od 5 i 10V
Ja sam se malopre probudio. Sve što sam napisao ja sam sanjao. Proverio sam, ne rade motori, preskaču i td.
Odoh da nastavim da spavam i sanjam kako sve radi.
Laku noć.
[ ZAS011 @ 26.01.2015. 05:22 ] @
@djbocko: Kada si već toliko siguran u sve što si gore napisao, zašto si uopšte pokretao diskusiju?
Ne znam koliko si upućen, ali tvoji motori ima da se tresu k'o kuče na zimi kada Win počne da se bakće svojim glupostima u pozadini (jitter step impulsa).
Svi "ozbiljni" korisnici CNC mašina koriste, pod Win-om (32-bit) barem Mach3 pošto je Artur napisao drajver koji je uspeo da "ubaci" odmah iznad ring0 kernel-a. Iz korisničkog režima to ne funkcioniše baš...
Sledeće, posle Win-a je LinuxCNC.
I jedno i drugo je vezano za LPT port.
Da bi se izbegli nedostatci koji su vezani za Win, postoje eksterni kontroleri koji se kače na USB port ili na ETH.
Ako ti se ne sviđa ni Win ni Lin, imaš TurboCNC pod DOS-om.
Čitava priča se vrti oko jitter-a. Probaj da uradiš nešto u vosku, za nakit, videćeš šta je jitter u stanju da ti uradi
Što se MOSFET-ova tiče, i dalje nisi u pravu što se nekih tvojih tvrdnji tiče. Prouči malo podrobnije šta je treshold voltage. Razmisli dobro kako se "puni" gejt i koje su karakteristike LPT porta (za ovo zadnje hint: LPT port može više da sinkuje struje nego što može da source-uje )
Prijatno spavanje i lepi snovi
[ djbocko @ 26.01.2015. 16:14 ] @
@ZAS011: Pošto si se javio evo ja ću se oglasiti još jednom, barem kad je ova tema u pitanju.
Nedostajao mi je samo moment pri većim brzinama na motoru ali uz tvoj savet sam i to rešio. Hvala za to. Kompletan softver sam ja pravio u WINXP i on gura celu mašinu kroz LPT i ne tresu motori. Jitter=0%.
Vidim da ste vas dvojica vrlo aktivni članovi ovog foruma i da dosta toga vrlo dobro poznajete. Čitao sam vaše postove na drugim temama.
Ne kapiram samo otkud toliko sujete u čoveku. Ako se javio neki nov član sa nekim pitanjem to ne znači da ga treba odmah deklasirati i po svaku cenu odbaciti njegove stavove. Da li je to mladost ili nezrelost ne znam. Neko bi se uvredio na ovako negiranje ali ja sam istrajao.
Pored svoje profesije ja odlično poznajem nekoliko oblasti iz elektronike i programiranja, ali nikad nisam rekao da znam sve, jer znam da nikad neću znati sve. Uvek slušam, učim, istražujem i nisam ograničen po tom pitanju. Zato sam se i obratio ovde na forumu.
Samo pokušavam da objasnim da to može i da radi bezprekorno ali niko ovde nema sluha. Pravila su pravila :-(
Ja razumem da Bogdan pokušava da objasni da moj fet nije potpuno zatvoren sa 4V na gejtu i ja to znam, ali on nije povezao moje prethodne postove gde sam rekao da taj moj fet ima offset na gejtu 2,4V tako da u ON odlazi sa 7,4V. Pogledaj samo šta je obeležio na grafikonu a mi komentarišemo o strujama reda veličine 0,5A na 32V. Na forumu treba komentarisati o novim rešenjima do kojih su ljudi došli a ne ograničiti se na nečije znanje, koje se pritom temelji na nadmenošću. Ja objašnjavam kako to radi a čovek kaže da to ne može da radi. Krajnje neprofesionalno, čak i nepristojno.
Kako je Jittter=0 na WINXP? Baš vas boli uvo da saznate jer za vas je ta mogućnost potpuno isključena.
Voleo bih da ti i Bogdan dođete do mene u Kruševac i uverite se u ono što pričam, taman da vidite neke modele i sl. Ako ste voljni daću vam moj broj telefona na PM.
Pozdrav svima.
[Ovu poruku je menjao djbocko dana 26.01.2015. u 19:02 GMT+1]
[ ZAS011 @ 26.01.2015. 19:20 ] @
Kada je softver u pitanju, pogotovo pod bloatware operativnim sistemom (WinXP), ne verujem da si postigao jitter od 0% (pod uslovom da nisi novi Arthur Fenerty, pisac .ocx kontrole i programa Mach3). XP nije RT operativni sistem, a ni kernel mu nije takav.
Ni linux nije RT operativni sistem ali postoji patch za ODREĐENI kernel koji sa paralelnim portom radi u RT (ne svi taskovi u OS-u, samo LPT).
I da ne dužim mnogo, nigde nisi pominjao bilo kakav (pred)drajver za MOSFET pošto je LPT port TTL/CMOS nivoa (koji nikako nije viši od 5V)
[ bogdan.kecman @ 26.01.2015. 20:06 ] @
Citat:
djbocko:
Nedostajao mi je samo moment pri većim brzinama na motoru ali uz tvoj savet sam i to rešio. Hvala za to. Kompletan softver sam ja pravio u WINXP i on gura celu mašinu kroz LPT i ne tresu motori. Jitter=0%.
ne kazem da nije moguce ali mislim da je gubljenje vremena/resursa no ne mislim da je lose to raditi ko ima viska resursa .. ne verujem ni da je jitter preterano veliki problem sa steperima kao sto je problem sa servoima posebno ako je u pitanju neki 2.5d milling ili slican cnc ... kod mojih masina je jitter problem zbog curenja pa se vide blobovi i neravnomerna extruzija ako ima jitera, sa druge strane ako zamenim printer glavu milling glavom jitter nista ne smeta posto nemam cetvrtu osu koja je alergicna na jitter :) .. dal imas jitter 0% ili ne ne znam, super ako je mali ili ako je nula
Citat:
djbocko:
Ja razumem da Bogdan pokušava da objasni da moj fet nije potpuno zatvoren sa 4V na gejtu i ja to znam, ali on nije povezao moje prethodne postove gde sam rekao da taj moj fet ima offset na gejtu 2,4V tako da u ON odlazi sa 7,4V.
ja rekoh da ce preko 6.5V da radi ok, ali evo pogledah tvoje postove jos jednom i ne vidim gde si napravio taj ofset od 2.4V a ako znas da nije potpuno otvoren na 5V sta onda zaje123 ..
a sujeta .. ne znam za zokija, nisam primetio, ali za sebe mogu da ti kazem da mogu da budem tvrdoglav (posebno kad nisam u pravu :D ) ali sujetan nisam uopste, posebno kada je elektronika u pitanju :)
[ djbocko @ 27.01.2015. 00:02 ] @
Ljudi,
Dugujem izvinjenje zbog moje greške. Softver radi na laptopu sa WIN2000 a ne sa XP.
U XP-u je samo izrađen i kompilovan(FW2.0), tako da ne smem da tvrdim da na XP-u neće biti jitter-a pošto nisam probao. Za sada mogu samo da pretpostavim da ga neće biti pošto su oba OS na NT-u.
Citat:
ZAS011: nigde nisi pominjao bilo kakav (pred)drajver za MOSFET pošto je LPT port TTL/CMOS nivoa (koji nikako nije viši od 5V)
Nisam pominjao jer preddrajvera i nema. Samo sam napravio razliku u naponu između porta i fet drajvera. To je ono kada se masa sa porta ne spaja direktno sa masom fet-drajvera, već se između njih napravi razlika u naponu. To je elektroničarska caka. Na taj način sam izbegao pred pobudu, koja opet traži 12 fetića, stabilizator, otpornike, novu ploču i td.
Pozdrav,
[ bogdan.kecman @ 27.01.2015. 07:21 ] @
Citat:
djbocko: Ljudi,
Dugujem izvinjenje zbog moje greške. Softver radi na laptopu sa WIN2000 a ne sa XP.
U XP-u je samo izrađen i kompilovan(FW2.0), tako da ne smem da tvrdim da na XP-u neće biti jitter-a pošto nisam probao. Za sada mogu samo da pretpostavim da ga neće biti pošto su oba OS na NT-u.
kernel je razlicit ali nijedan nije rtos ne verujem da ima mnogo razlike ..
[ ZAS011 @ 27.01.2015. 07:59 ] @
No more comments s' moje strane.
[ djbocko @ 27.01.2015. 12:14 ] @
Kada je reč o jitteru gledaj na to ovako:
Znamo da nam aplikacija ne može zauzeti 100% CPU i to je ok. Ali šta će nam 100%, ne treba nam. A da li možemo da rezervišemo recimo 5% vremena za Windows i ostalo, a ostatak za našu aplikaciju, s'tim što će svaki ciklus raditi mekan multitasking, tako da čemo naših 95% doživljavati kao real time? Pošto je i CPU clock sa naredbama neuporediv sa vremenom vođenja faza step motora mi imamo jitter približno nuli. Napomene radi, skoro svaki step motor ima +-5% tolerancije u odnosu na ugao koraka. O tome niko ne misli.
Pozdrav.
[ djbocko @ 27.01.2015. 17:52 ] @
Evo i snimka kao dokaz:
Brzina motora ≈ 13RPS (780RPM)
Bez štucanja i preskakanja i td. Bolje i brže od nekih fabričkih stepper drivera.
Pozdrav.
[Ovu poruku je menjao djbocko dana 27.01.2015. u 19:53 GMT+1]
[ bogdan.kecman @ 27.01.2015. 18:02 ] @
ne kapiram ovaj tvoj film, niko nije rekao da ti ne mozes da okrenes
motor iz windoze, ono sto je zoki rekao a ti ne zelis da prihvatis je da
ti doza pravi jitter koji ne mozes da kontrolises (cak i sa RT patchem
koji ima mach, a cak ni full RT kernel na lindzi sa linuxcnc ne radi
kako valja na laptopovima, ume da stucne pri dugom printanju) .. kod
2.5D masine kao tvoje to i nije preterano bitno jer ti je X i Y pomak u
sinku pa ako kasni jedan kasnice i drugi, a Z ti je suvise spor da bi
jitter bio bitan, posebno sto ti je veca greska na tom M8 brezonu nego
sto je windoze jitter tako da je potpuno nebitno


 )
)