[ dr.zmaj @ 21.08.2009. 18:24 ] @
|
| Napravio sam robot ruku koju pokrecem preko LPT racunara i interfejsa. Robot ima male DC motore koji pokrecu odredjene zglobove robota. Ono sto bih zeleo jeste da napravim dodatnu konstrukciju koja ce u zglobovima imati potenciometre. Ta dodatna konstrukcija bi bila jedna vrsta dzojstika koju bi ja pokretao rukom. Ona bi trebala da ima zadatak da prenosi ugao pokretanja svakog zgloba na motore robota i potenciometre koji se nalaze na osovinama zglobova robota. Drugim recima princip rada je slican kao nekada na onim pozicionerima za krovne antene. Motor se okrece dok potenciometar na osovini motora ne dostigne istu vrednost kao na manipulatoru. Da li ima neko semu ili nesto sto bi mi pomoglo da ovo realizujem. Na netu sam video jedan video, tip koji na taj nacin pokrece malu robot ruku.
|
[ shadow88 @ 21.08.2009. 18:48 ] @
pa vidi, najbolje bi bilo da onda igradis servo motorice pa da pojeddinacno za svaki motor imas po jedan potenciometar koji ce da menja frekvenciju oscilatora i regulise polozaj serva od min do max ugla tj zakretanja, ili da ih simuliras tj ubacis potenciometre u svaki zglob po jedan, koji ce da daju povratnu imformaciju u kom se polozaju koji zglob ruke nalazi a motore kontrolises komparatorom koji ce da uporedjuje polozaj potenciometra ruke i upravljackog potenciometra koji je spolja, tj uporedjivace njihove napone i gonice DC motore u odredjenom (zadatom ) smeru dok ne dovede zglob ruke tj taj potenciometar u isti polozaj u kom je upravljacki potenciometar. e sad ako hoces dzojstik onda ti je dovoljno da postavis za svaki pravac dzojstika po jedan dvopolni prekidac koji ce da goni motore u zadatom smeru dok ne pustis dzojstik tj dok se ne iskljuce prekidaci. a ako zelis da kontrolises ugao pomeranja svakog zgloba, tj koliko pomeris palicu dzojstika toliko da ti se pomeri odredjen zglob, onda je opet u igri prica sa komparatorom i potenciometrima ili servoima i oscilatorima, samo sto potenciometre ugradjujes u dzojstik , tj na svaki zglob (komandu) dzojstika ugradis potenciometar za zeljenu komandu.
ne bi bilo loze da malo postavis neku sliku toga sto si pravio,neku semu i objasnjenje,i obavezno objasnjenje upravljanja kako bih mogao malo opsirnije da ti pomognem a i jako me zanima kako to izgleda i koje su mu mogucnosti ;)
takodje ako imas neko znanje o softverima , mozes negde da nabavis onu rukavicu sto detektuje polozaj ruke dok ti je na ruci (ne znam kako se tacno zove) pa preko kompa da svojom rukom upravljas tom mehanickom :)
[ PedjaZ @ 21.08.2009. 22:46 ] @
Prouci malo Gameport na PC-u.
To ti je najjednostavnije jer je napravljen za to
http://en.wikipedia.org/wiki/Game_port
Imas cetiri ovakva ulaza:
Pin 3, 6, 11, 13 (0-100 kohm)
Ako neces sa njim da petljas vec samo sa LPT
onda NE555 na odredjenoj frekvenciji i sa potenciometrom menjas odnos 1/0 a preko programa meris i tako odredjujes polozaj.
Naravno mnogo preciznije bi bilo sa servo motorima i optokaplerima ali je to druga prica:
http://www.audiohms.com/produc...servo_motor/dc_servo_motor.htm[ PedjaZ @ 22.08.2009. 00:49 ] @
[ dr.zmaj @ 28.08.2009. 08:33 ] @
Kad sam rekao dzojstik mislio sam na uredjaj koji bi licio na robot ruku samo manjih dimenzija, koji bi imao u svojim zglobovima ugradjene potenciometre. Znaci ona nema na sebi motore nego samo potenciometre. Povezana je sa pravom robot rukom koja ima male DC motore, koja takodje ima potenciometre na svojim zglobovima. Dobro si rekao da bi komparator vrsio proveru polozaja hajde da nazovemo taj dzojstik manipulator koji ja drzim rukom i pokrecem, robot ruka bi trebala da prati pokrete manipulatora. Mislim da to moze i bez racunara da se odradi, ali ne mogu se setiti kako je to islo. Kako da uradim taj komparator koji bi bio veza izmedju manipulatora i robot ruke. Ona shema sa NE555 je neki multivibrator ako se ne varam. Pokusacu da nadjem na netu onaj video o kojem ti govorim.
http://www.youtube.com/watch?v...lk&feature=player_embedded
Sto se tice game porta to znam, radio sam meteo stanicu preko tog porta (merenje brzine vetra, smera vetra, temperature).
[ sinisa_s @ 28.08.2009. 09:08 ] @
To sto ti radis je telemanipulacija (eng: telemanipulation). Probaj da nadjes na internetu da li postoje neki jednostavni projekti pa da vidis kako su ljudi to uradili. U sustini ti treba da iscitas vrednosti sa potenciometara pa da te vrednosti koristis kao referentnu velicinu (ulaznu velicinu) za regulator polozaja u ruci tvog robota. E sad posto ti zelis da to radi na daljinu ili kao u tom filmicu da je ruka montirana na nekog robotica, verovatno ces morati da potenciometre vezes na AD konvertor pa da potom te digitalizovane vrednosti saljes ka manipulatoru (kablom, bezicno..). Potom na manipulatoru ces koristiti tu vrednost za upravljanje motorima (PID kontroler ili sicno).
Mogao bi verovatno da signal direknto sa potenciometra kablom odvedes do manipulatora (bez konverzije) pa da ga koristis kao ulaznu velicinu za kontroler. Problem ce biti sto ces tada imati par kablova izmedju dzojstika i robota i eventualne smetnje.
Postavi par slika ako si raspolozen da vidimo kako si konstruisao ruku i koje motore koristis.
Eto par ideja.
Pozdrav.
[ PedjaZ @ 28.08.2009. 15:07 ] @
Ako hoces bez kompjutera onda guglaj COMPARATOR
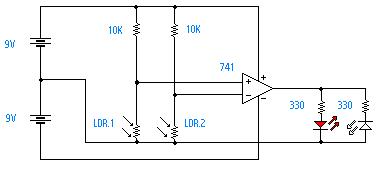
Ovo je bas ono sto tebi treba.
Dva potenciometra i umesto LED povezes motor, naravno preko nekih tranzistora.
http://www.angelfire.com/electronic/beausalector/741Opamp.html
Evo jos malo:
http://www.technologystudent.com/elec1/opamp3.htm

------------------------
A ono nije "neki multivibrator" nego 555 Timer as an A/D converter
ako hoces preko kompa na najjednostavniji nacin. [ Nikola M @ 02.09.2009. 07:20 ] @
Ja bih ti takođe predložio da upotrebiš servo motore sa drajverima. Kojliki im pomeraj zadaš oni toliko odu i to je to.
Jedino baš ako hoćeš da ta ruka nešto baš čvrsto steže, drži, ili imaš veoma promenljivu silu stezanja ("držanja", ne znam kako bih ovo nazvao) onda mislim da treba prava povr.sprega i jači motori, a u suprotnom ne.
Ispravka, sad sam video da sam pogrešno razumeo pitanje... Ovo sa komparatorima jeste ok ideja da ne ulazim u detlaje...
[ shadow88 @ 03.09.2009. 00:29 ] @
servo motori se regulisu frekvencijom, svaki servo ima svoj opseg frekvencije definisane od proizvodjaca, zna se tacno za svaki motor kolika frekvencija je koji ugao za servo motor i ova mogucnost bi bila najjednostavnija a najskuplja za izvedbu. a kad smo kod komparatora, jednostavno receno, osetno preciznije resenje, jeftinije jer koristis obicne DC motore ali sa daleko vise vodova izmedju ruke i dzojstika , osim ako ides na bezzicnu varujantu sto ti dodatno vrlo komplikuje stvar, mislim da bi bezzicna varijanta sa servo motorima bila jednostavno i dobro resenje za ovu namenu. sto se tice servoa i snage, odaberi neki kompromis izmedju brzine i snage, znaci servo sa odgovarajucomn redukcijom i odgovarajuce snage motora...
[ dr.zmaj @ 05.09.2009. 16:18 ] @
Imam servo motor HS-311, koji se koristi u RC modelima, ali i u manjim robotima. Pokusao sam da ga pokrenem bez mikrokontrolera, samo programom, a motor sam spojio na paralelni port racunara. Uradio sam jedan mali program u Basicu, uspeo sam da ga okrecem ali samo u jednom smeru, cak da mu menjam i brzinu, ali nikako da smislim kako da ga pokrenem u suprotnom smeru.
[ PedjaZ @ 05.09.2009. 17:37 ] @
H-bridge (guglaj malo) ili
Duplo napajanje ( +, masa, -)
pa jedan kraj motora na masu a drugi spajas na + ili -
(jedan izlaz sa paralelnog za + a drugi izlaz da ga spaja na -)
pazi da program ne pobrljavi pa da u istom trenutku bude spojen sa + i -
[ guja011 @ 05.09.2009. 17:43 ] @
taj motor ima hod od 180° i položaj je uslovljen dužinom impulsa - u jednom krajnjem položaju je 0,6mS a u drugom 2,4mS. sredina je 1,5mS.
osnovna frekvencija je (valjda) 50Hz
[ PedjaZ @ 05.09.2009. 18:13 ] @
[ guja011 @ 05.09.2009. 19:23 ] @
pretragom "servo tester" po netu ćeš naći nekoliko rešenja za generisanje signala za testiranje servoa (ne555/cmos logika ili pic ili pc)
[ dr.zmaj @ 06.09.2009. 19:22 ] @
Napravio sam ono sa NE555. Pomocu potenciometra na semi odredjujem polozaj servo motora zavisno od ulaznog napona koji dolazi preko R=100K. Zanima me kako da racunarom odredim zeljeni polozaj servo motora. Kako da programski generisem impulse. Pokusao sam sa QBasic-om ali pokrecem ga samo u jednom smeru.
[ PedjaZ @ 06.09.2009. 23:14 ] @
Nadji na netu "code" pa izvuci deo koji tebi treba
http://www.rentron.com/servo.htm
Skini :
http://www.rentron.com/Files/serservo.zip
pa pogledaj kod
PicBasic je slican QBasicu
Ili ovaj projekat
http://www.cloudynights.com/ub.../0/Number/2740279/Main/2740255
Hteo sam da ti predlozim forum o Visual Basic-u
ali vidim da te ima i tamo
http://www.elitesecurity.org/t372319-VB-servo-motor
[ PedjaZ @ 08.09.2009. 00:06 ] @
Nista ne pises?
Pronasao sam ovo:
http://home.earthlink.net/~tdickens/68hc11/servo/servo.html
http://www.dprg.org/projects/2003-05a/
http://www.seattlerobotics.org/guide/servos.html

Frequency / High-time / Condition
30 mS______2.3 mS_____servo left
30 mS______0.36 mS____servo right
30 mS______1.2 mS____servo middle
A high time from 0 mS to 2.3 mS will control the servo position from right (clockwise) to left (ccw).
The middle signal of 1.2 mS is halfway, so the control signal is linear.
The servo will operate correctly in a frequency range from 13 mS to 92 mS (77 Hz to 11 Hz).
Ovo je sve sto bi trebao da znas. [ dr.zmaj @ 09.09.2009. 17:31 ] @
Znam za te podatke, ali mi ne uspeva programski da ih realizujem. Izgleda da bez mikrokontrolera nece ici ili da izbacim elektroniku iz serva, a motor direktno spojim na relejnu karticu. Kazem ti da pomocu one seme sa NE555 radi, tacno mogu da ga postavim u odredjeni polozaj pomocu potenciometra.
[ guja011 @ 09.09.2009. 20:04 ] @
Citat: dr.zmaj: Znam za te podatke, ali mi ne uspeva programski da ih realizujem. Izgleda da bez mikrokontrolera nece ici ili da izbacim elektroniku iz serva, a motor direktno spojim na relejnu karticu. Kazem ti da pomocu one seme sa NE555 radi, tacno mogu da ga postavim u odredjeni polozaj pomocu potenciometra.
čerupanje serva je šteta pod bilokojim izgovorom. tražio si na početku mogućnost da sa potijem zadaješ položaj, to si i dobio.
priča sa pc-jem je sasvim druga stvar.
ukoliko te zanima više kanala koristi gotov rc pa ga modifikuj, možeš da nakačiš do osam kanala servoa i sa isto toliko potija da zadaješ komande. [ PedjaZ @ 09.09.2009. 23:03 ] @
Bice to malo teze izvesti u kilavom VB
Ili da znas neki drugi "brzi" programski jezik ili preko mikrokontrolera.
A nekako preko serijskog porta?
Samo treba slati odredjene karaktere koji bi "licili" na te promene od 0.36mS do 2.4mS.
Naravno ovo je samo ideja a do realizacije ima mnooogoooo
http://en.wikipedia.org/wiki/RS-232
http://en.wikipedia.org/wiki/Asynchronous_start-stop
http://en.wikipedia.org/wiki/ASCII
http://www.planet-source-code.com/vb/default.asp?lngWId=1
http://www.epanorama.net/multi.php?search=&q=rc+servo
http://www.epanorama.net/documents/motor/rcservos.html
------------
Nego kako si ti povezao servo sa kompjuterom?
[Ovu poruku je menjao PedjaZ dana 10.09.2009. u 01:19 GMT+1][ dr.zmaj @ 13.09.2009. 18:58 ] @
Plus i minus serva na bateriju, a zicu za impulse na jedan od izlaznih pinova LPT-a.
[ PedjaZ @ 16.09.2009. 00:27 ] @
Ako je prema ovim podacima

1.5ms sredina
0.6 ms levo
2.4ms desno
Napravis dva tajmera
Prvi (logicka nula)
da bude 30ms i njega ne moras da diras.
a drugi (logicka jedinica)
da bude 1.5ms
i vrtis tu petlju tako.
Ako hoces da servo ode skroz levo onda
Nula
30ms
Jedinica
0.6ms
Ili ako hoces skroz desno
Nula
30ms
Jedinica
2.4ms
Kako ces da odredis tih 0.6ms - 2.4ms zavisi od programa-
VB-ov tajmer je suvise spor za to.
Druge ne znam tako da ne mogu da ti kazem.
Jedino da pitanje postavis u forumu za programski jezik C ili neki slican
pa da ti neka dobra dusa odradi to, a ti samo preko VB pozivas tu rutinu.
[Ovu poruku je menjao PedjaZ dana 17.09.2009. u 23:52 GMT+1][ Evil_Machine @ 19.09.2009. 04:52 ] @
Evo mog diplomskog. Ne znam koliko ce vam to biti zanimljivo.
http://www.youtube.com/watch?v=haylMIvjPDE
Koristio sam gotovu ruku i servo kontroler.
[Ovu poruku je menjao Evil_Machine dana 19.09.2009. u 17:14 GMT+1][ dr.zmaj @ 22.09.2009. 18:23 ] @
Kako si zadavao polozaj ruke, pretpostavljam posto je dole bela ploca da si snimao polozaj svoje ruke kamerom, ako se ne varam. Lepo je kad koristis gotove proizvode, ali ovde je tema da se sve napravi samostalno. Mogao bi nesto vise o svom projektu da napises ili da mi posaljes neke informacije na meil. Evo nekih slika ruke koju sam pravio od prirucnog materijla, U AL profil, svi motori su DC iz raznih kineskih automobila, jedino je motor koji pomera ruku levo desno iz malih busilica. Postolje je od gramofona. Sve spojeno preko U/I kartice samostalne izrade na LPT racunara, softver je u QBasicu i u VB6.
[Ovu poruku je menjao dr.zmaj dana 22.09.2009. u 19:58 GMT+1]
[Ovu poruku je menjao dr.zmaj dana 22.09.2009. u 20:00 GMT+1]
[ s1axo @ 23.09.2009. 06:43 ] @
Evil_Machine
gdje si nabavio gotovu ruku?
[ Evil_Machine @ 23.09.2009. 14:43 ] @
Pa i jesam napravio sam. Od dve krsh web kamere napravio sam motion capture sistem i to bez markera koji je najtezi za realizaciju. Kamere detektuju ruku i oblik ruke u prostoru (otvorena zatvorena). Pozadina je bela cisto slucajno, jer nemam dovoljno mesta na stolu, a da nisam stavio plocu ulazile bi mi i noge u kadar jedne od kamera koja snima i detektuje poziciju ruke pa bi je to zbunjivalo.
Gotova ruka je sa fakulteta, malo doradjena. Guglaj robot arm sg6.
[ dr.zmaj @ 27.09.2009. 16:05 ] @
Hajde daj nesto vise o tom sistemu, softveru.
[ Evil_Machine @ 29.09.2009. 03:17 ] @
Rado, ali pitajte konkretnije sta vas zanima.
Sve je pisano u C++, koriscen je gnu kompajler i openCV biblioteka.
Dve kamere prvo skeniraju sta je pozadina, da bi posle mogli da razlikuju sta je dodato.
Dve kamere, znaci neki kvazi stereo, nije stereo vid. Obicne jeftine web kamere pa je bilo potrebno napisati filter za shum, jer ga ima previshe.
takodje je potrebno imati neki filter za sneg.
Kada se poredi referentna slika pozadine sa strenutnom svaka kamera iz svog ugla detektuje neki uslov da to bude predmet velicine shake, a jedna od njih ima jos da detektuje da li je saka otvorena ili zatvorena.
Najveca specificnost je u tome sto nema nikakvih markera.
Kada se izracuna pozicija sake na te dve kamere, dobije se koordinata sake u prostoru.
Inverzanom kinematikom se racunaju pozicije motora i salju se pozicije robotskoj ruci.
Sve se odvija u petlji pa se dobije ono na kraju da radi u realnom vremenu.
Pa ako ima jos nesto tu sam.
Ako neko ima neku bas fensi ruku mozemo da se udruzimo.
Pozdrav
Copyright (C) 2001-2026 by www.elitesecurity.org. All rights reserved.
|