[ goran 1966 @ 21.02.2017. 20:42 ] @
Poznat je ulazni moment M, kao i dužine svih poluga. Da li neko može da izvede obrazac u kojem je sila u funkciji od trenutnog ugla β ? |
|
[ goran 1966 @ 21.02.2017. 20:42 ] @
[ Nedeljko @ 22.02.2017. 19:01 ] @
treba znati šta je tu pokretno, a šta nepokretno.
[ goran 1966 @ 22.02.2017. 19:51 ] @
Citat: Nedeljko: treba znati šta je tu pokretno, a šta nepokretno. Poštovani , Možete na ovom linku da vidite šta je pokretno , a šta nepokretno : http://www.elitesecurity.org/t494683-0#3736825 Sve poluge su pokretne. Poluga a vrši punu rotaciju oko jednog kraja ( rotacija 360 stepeni ), poluga d vrši ravno kretanje . Poluga b vrši rotaciju ( samo dio kruga ) oko svog lijevog kraja, a poluga c vrši ravno kretanje. Ako Vam trebaju vrijednosti dužina poluga , ili bilo koji drugi podatak , stojim Vam na raspolaganju. pozdrav [ VoltAmper..W @ 22.02.2017. 21:17 ] @
Tesko da ce ti neko resavati taj zadatak posto tu ima prilicno posla, zato je bolje da krenes sam da radis.
1) Napises jednacine za racunanje kinematickih parametara (uglova, pozicije pokretnog clana(klizaca)) pri cemu za poznate velicine uzimas sve ono sto procitas sa slike(duzinu stapova, pozicije nepokrethih tacaka i ugao B). U ovom slucaju imas 2 vektorske konture 1. levi oslonac, gornja tacka, centar klizaca. Iz ove jednacine dobijas ugao stapa b sa x osom i rastojanje centra klizaca od levog oslonca. 2. levi oslonac, gornja tacka, donja tacka i donji oslonac. Iz ove jednacine dobijas uglove stapova a i d sa x osom 2) Radis dekompoziciju mehanizma na pojedinacne clanove i pises uslove staticke ravnoteze i to od poslednjeg clana ka pogonskom [ goran 1966 @ 22.02.2017. 22:06 ] @
Citat: VoltAmper..W: Tesko da ce ti neko resavati taj zadatak posto tu ima prilicno posla, zato je bolje da krenes sam da radis. 1) Napises jednacine za racunanje kinematickih parametara (uglova, pozicije pokretnog clana(klizaca)) pri cemu za poznate velicine uzimas sve ono sto procitas sa slike(duzinu stapova, pozicije nepokrethih tacaka i ugao B). U ovom slucaju imas 2 vektorske konture 1. levi oslonac, gornja tacka, centar klizaca. Iz ove jednacine dobijas ugao stapa b sa x osom i rastojanje centra klizaca od levog oslonca. 2. levi oslonac, gornja tacka, donja tacka i donji oslonac. Iz ove jednacine dobijas uglove stapova a i d sa x osom 2) Radis dekompoziciju mehanizma na pojedinacne clanove i pises uslove staticke ravnoteze i to od poslednjeg clana ka pogonskom Molim da pomognete , ako možete . Postavite jednačine , a ja ću da odradim fizički posao oko njihovog rješavanja. [ miki069 @ 23.02.2017. 12:41 ] @
Imaš poseban forum Fizika.
Pitaj tamo. [ Nedeljko @ 23.02.2017. 14:51 ] @
Neverovatno!
Ja sam bio ubeđen da sam sinoć postavio postupak, a sad ga ne vidim. Ništa, postaviću opet. Dakle, tačke  i i  su nepokretne, dužine su nepokretne, dužine  konstantne i konstantne i  koordinata tačke koordinata tačke  je konstantna. Obeležavaću je sa je konstantna. Obeležavaću je sa  i slično za ostale taćke. i slično za ostale taćke.U prvom koraku na osnovu ugla  određujemo koordinate svih tačaka, kao i ugao određujemo koordinate svih tačaka, kao i ugao  . . , , , ,Tačka  se određuje kao presek krugova se određuje kao presek krugova(1)  , ,(2)  , ,Oduzimanjem ove dve jednačine se dobija linearna algebarska jednačina po  i i   preko . preko .(3)  , ,(4)  , ,  . .Zatim to zamenimo u jednačini (1)  . .Ovo je kvadratna jednačina po . . .Odavde se može izračunati . . .Potom pomoću (3) možemo izračunati . Napokon, . .Sada treba izračunati diferencijale tačaka, odnosno njihove izvode po . , , . .Takođe je (5)  . .Diferencijali jednačina (1) i (5) daju dve linearne jednačine po  i i  . . , , . .Rešavanjem ovog sistema dobijaju se i preko  , odnosno odgovarajući izvodi po , odnosno odgovarajući izvodi po  . Diferenciranjem jednačine . Diferenciranjem jednačine dobijamo da je  , ,odnosno  . .Napokon smo odredili izvod od  po . po .Sada na osnovu odnosa pređenih puteva možemo odrediti odnos sila i konačno željenu silu.  . .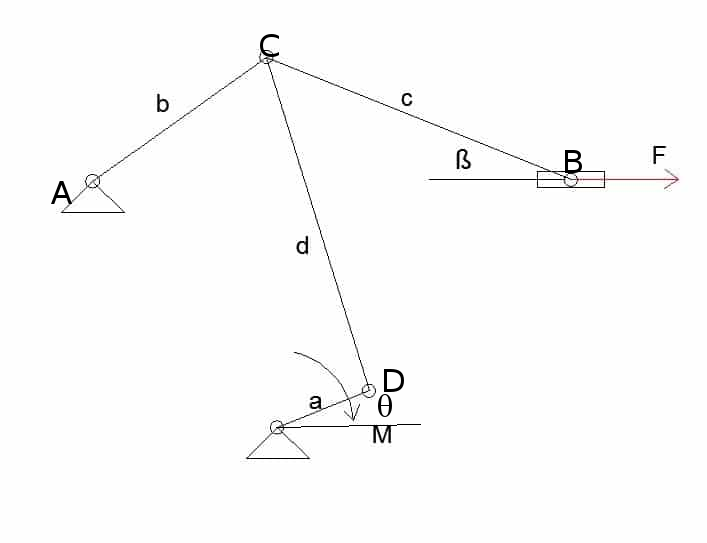 [Ovu poruku je menjao Nedeljko dana 23.02.2017. u 16:17 GMT+1] [ Nedeljko @ 23.02.2017. 14:54 ] @
U stvari, ja jesam sinoć poslao skicu na onoj drugoj temi.
[ Nedeljko @ 23.02.2017. 15:09 ] @
Ima još jedan problem.
Obzirom da poluga a ima punu rotaciju (za ugao od 360 stepeni), mora se voditi računa da prilikom određivanja tačke D postpoje dva rešenja. Treba odrediti oba, a potom videti koje je od ta dva rešenja pravo. Recimo, ako je simulacija u pitanju, onda uzastopni položaji moraju biti bliski. [ zzzz @ 23.02.2017. 16:36 ] @
Evo dopune crteža gdje su date smjernice za računanje.Neka je ishodište u A.
Nešto teže je izraziti koordinate tačke E pa sam dao skicu dva pravougla trokuta odakle se to može naći. Sila na kraku a se dobije iz momenta,ali to je samo jedna komponenta sile u štapu d.Kako naći ukupnu silu? Najlakše rastavljanjem u horizontalne i vertikalne komponente jer znamo da su omjeri tih komponenti jednaki omjerima kateta koordinatnih trokutova.Kad se nađe sila u štapu d,na isti način je treba rasčlaniti u dva štapa b i c.Opet koristiti vertikalne i horizontalne komponente. na kraju nama zapravo treba samo horizontalna komponenta u štapu c. Račun treba provesti i za slučaj kad je tačka E lijevo od BD. Da bi se izbjegle moguće greške kod vučenja dugih jednačina ( sinusa,kosinusa,korjenovima itd),a radi preglednosti, Bolje je račun za sile provesti unatraške.(Ako bude trebalo napisaću ga.) 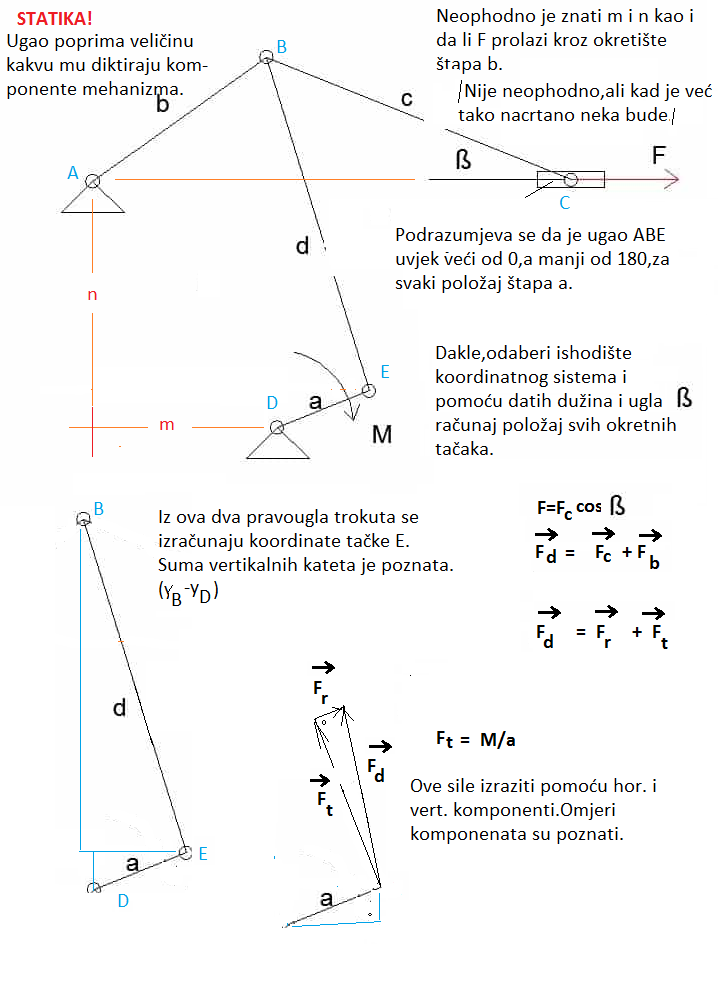 [ goran 1966 @ 23.02.2017. 19:03 ] @
Citat: Nedeljko: Neverovatno! Ja sam bio ubeđen da sam sinoć postavio postupak, a sad ga ne vidim. Ništa, postaviću opet. Dakle, tačke i su nepokretne, dužine konstantne i koordinata tačke je konstantna. Obeležavaću je sa i slično za ostale taćke.U prvom koraku na osnovu ugla određujemo koordinate svih tačaka, kao i ugao .,,Tačka se određuje kao presek krugova(1) ,(2) ,Oduzimanjem ove dve jednačine se dobija linearna algebarska jednačina po i preko .(3) ,(4) , .Zatim to zamenimo u jednačini (1) .Ovo je kvadratna jednačina po ..Odavde se može izračunati ..Potom pomoću (3) možemo izračunati . Napokon,.Sada treba izračunati diferencijale tačaka, odnosno njihove izvode po .,.Takođe je (5) .Diferencijali jednačina (1) i (5) daju dve linearne jednačine po i .,.Rešavanjem ovog sistema dobijaju se i preko , odnosno odgovarajući izvodi po . Diferenciranjem jednačinedobijamo da je ,odnosno .Napokon smo odredili izvod od po .Sada na osnovu odnosa pređenih puteva možemo odrediti odnos sila i konačno željenu silu. .[Ovu poruku je menjao Nedeljko dana 23.02.2017. u 16:17 GMT+1] Molim Vas da mi objedinite objašnjenje sa formulama, ne mogu da se snađem. Tok rješavanja kao i konačnu formulu, ako Vam je lakše možete mi uraditi na papiru, uslikati, pa mi fotografiju privatno poslati na mail. Zahvaljujem se na Vašem utrošenom vremenu. Postavljam novu skicu sa dimenzijama mehanizma. Ako Vam je teško ponovo pisati proračun pošaljite samo konačni obrazac pa ću ga ja anlizirati. Pozdrav.  [Ovu poruku je menjao goran 1966 dana 23.02.2017. u 20:14 GMT+1] [ Nedeljko @ 23.02.2017. 20:40 ] @
Hajde, napiši šta ti prvo nije jasno.
[ goran 1966 @ 23.02.2017. 20:54 ] @
dobio si pomijeranje tačke B u zavisnosti od pomijeranja tačke c i od ugla beta
nije mi jasno šta dalje radiš [ goran 1966 @ 23.02.2017. 22:27 ] @
ne mogu se snaći , trebaš dati skicu gdje se vidi šta je cx, ax ,ay ... trebao mi je pun sat da preko obrazaca shvatim kako
skica izgleda. nisam shvatio kako si pomijeranje tačke c povezao sa uglom teta. [ Nedeljko @ 24.02.2017. 11:58 ] @
Priložio sam sliku na kojoj su označene tačke A, B, C, D i E.
Cx i Cy su koordinate tačke C. Ax i Ay su koordinate tačke A. I tako za sve tačke. Što se pomeranja tačke C tiče, prvo se obradi pomeranje tačke D. Diferencijali jednačina  , , , ,su , . .Tako se obračunava kretanje tačke D. Kada to imamo, onda se kretanje tačke C obračunava tako što računamo diferencijale jednačina tačke C. Naime, C je na rastojanju b od tačke A i na rastojanju d od tačke D. , . .Diferenciranjem se dobija  , , . .To su dve linearne jednačine po dCx i dCy. Sređivanjem se dobija ,.Rešavanjem ovog sistema se dobijaju dCx i dCy. [Ovu poruku je menjao Nedeljko dana 24.02.2017. u 17:29 GMT+1] [ zzzz @ 24.02.2017. 15:32 ] @
Citat: goran 1966: Poznat je ulazni moment M, kao i dužine svih poluga. Da li neko može da izvede obrazac u kojem je sila u funkciji od trenutnog ugla β ? Imam i ja neka pitanja. Ovo mi liči na neku koljenastu presu pa ako je tako onda te zanima sila samo dok je usmjerena desno? Da li bi umjesto funkcije F=f(beta) bilo pogodno da se ovisnost prikaže tabelarno sa po želji izabranim korakom promjene ugla? Da li bi smjeli upotrijebiti ACad program za izradu ove tabele,ili barem Excel? Ovo navodim jer je obrazac koji tražiš jedna velika kobasica koja sadrži mnogo članova u kojima egzistiraju sve vrijednosti navedenih dužina,razno korijenje,razlomci,sin,cos.kvadrati itd. Acad daje rješenje za par minuta,a za prilagođavanju Excelu treba nešto više vremena. Ako baš institiraš na "obrascu" mogu ja to krajnje postepeno i na razumljiv način samo što je to stara tehnologija koja je očajno spora. [ goran 1966 @ 24.02.2017. 16:23 ] @
Citat: Nedeljko: Priložio sam sliku na kojoj su označene tačke A, B, C, D i E. Cx i Cy su koordinate tačke C. Ax i Ay su koordinate tačke A. I tako za sve tačke. Što se pomeranja tačke C tiče, prvo se obradi pomeranje tačke D. Diferencijali jednačina ,,su ,.Tako se obračunava kretanje tačke D. Kada to imamo, onda se kretanje tačke C obračunava tako što računamo diferencijale jednačina tačke C. Naime, C je na rastojanju b od tačke A i na rastojanju d od tačke D. ,.Diferenciranjem se dobija ,.To su dve linearne jednačine po dCx i dCy. Sređivanjem se dobija [tex(C_x-A_x)dC_x+(C_y-A_y)dC_y=0[/tex], .Rešavanjem ovog sistema se dobijaju dCx i dCy. ne vidim obrasce , vidim samo tačke ispod teksta , nisi dao konačni obrazac ,možeš li da ga napišeš ? [ goran 1966 @ 24.02.2017. 16:30 ] @
Citat: zzzz: Citat: goran 1966: Poznat je ulazni moment M, kao i dužine svih poluga. Da li neko može da izvede obrazac u kojem je sila u funkciji od trenutnog ugla β ? Imam i ja neka pitanja. Ovo mi liči na neku koljenastu presu pa ako je tako onda te zanima sila samo dok je usmjerena desno? Da li bi umjesto funkcije F=f(beta) bilo pogodno da se ovisnost prikaže tabelarno sa po želji izabranim korakom promjene ugla? Da li bi smjeli upotrijebiti ACad program za izradu ove tabele,ili barem Excel? Ovo navodim jer je obrazac koji tražiš jedna velika kobasica koja sadrži mnogo članova u kojima egzistiraju sve vrijednosti navedenih dužina,razno korijenje,razlomci,sin,cos.kvadrati itd. Acad daje rješenje za par minuta,a za prilagođavanju Excelu treba nešto više vremena. Ako baš institiraš na "obrascu" mogu ja to krajnje postepeno i na razumljiv način samo što je to stara tehnologija koja je očajno spora. to jeste mehanizam koljenaste prese ( mehanička presa ). ja sam radio preko auto -cad-a , tako što sam nacrtao dvadesetak uzastopnih položaja , pa svaki ponaosob grafički rješavao. to je jako puno posla i traži puno vremena, tako da to nije baš dobar put da se ovaj problem riješi. zato sam na forumu tražio da mi neko izvede obrazac u kom sila na pritiskivaču zavisi od ugla poluge c sa horizontalnom ravni. nikola je izveo obrazac , ali ga nije postavio , tako da ne mogu da uporedim rezultate . U pravu si , traži se sila samo u radnom hodu -kad pritiskivač-kraj poluge c- ide s lijeva udesno. pokušaj da dođeš do obrasca -postupno-sa objašnjenjima -korak po korak [Ovu poruku je menjao goran 1966 dana 25.02.2017. u 08:33 GMT+1] [ Nedeljko @ 24.02.2017. 16:33 ] @
Pa, vidi, rekao si da ćeš fizički deo posla da obaviš sam. Za rešavanje sistema od dve linearne algebarske jednačine sa dve nepoznate možeš da koristiš na primer Kramerovo pravilo.
https://en.wikipedia.org/wiki/Cramer's_rule#Applications Iz onog linearnog sistema izrazi šta su dCx i dCy. [ goran 1966 @ 24.02.2017. 16:46 ] @
ok, hvala
[ goran 1966 @ 25.02.2017. 07:30 ] @
pokušaj da dođeš do obrasca -sa objašnjenjima
[ Nedeljko @ 25.02.2017. 19:05 ] @
Gde si zapeo? Unesi konkretne numeričke podatke, pa da vidimo hoće li.
Copyright (C) 2001-2026 by www.elitesecurity.org. All rights reserved.
|