[ SASA M. @ 06.06.2021. 22:06 ] @
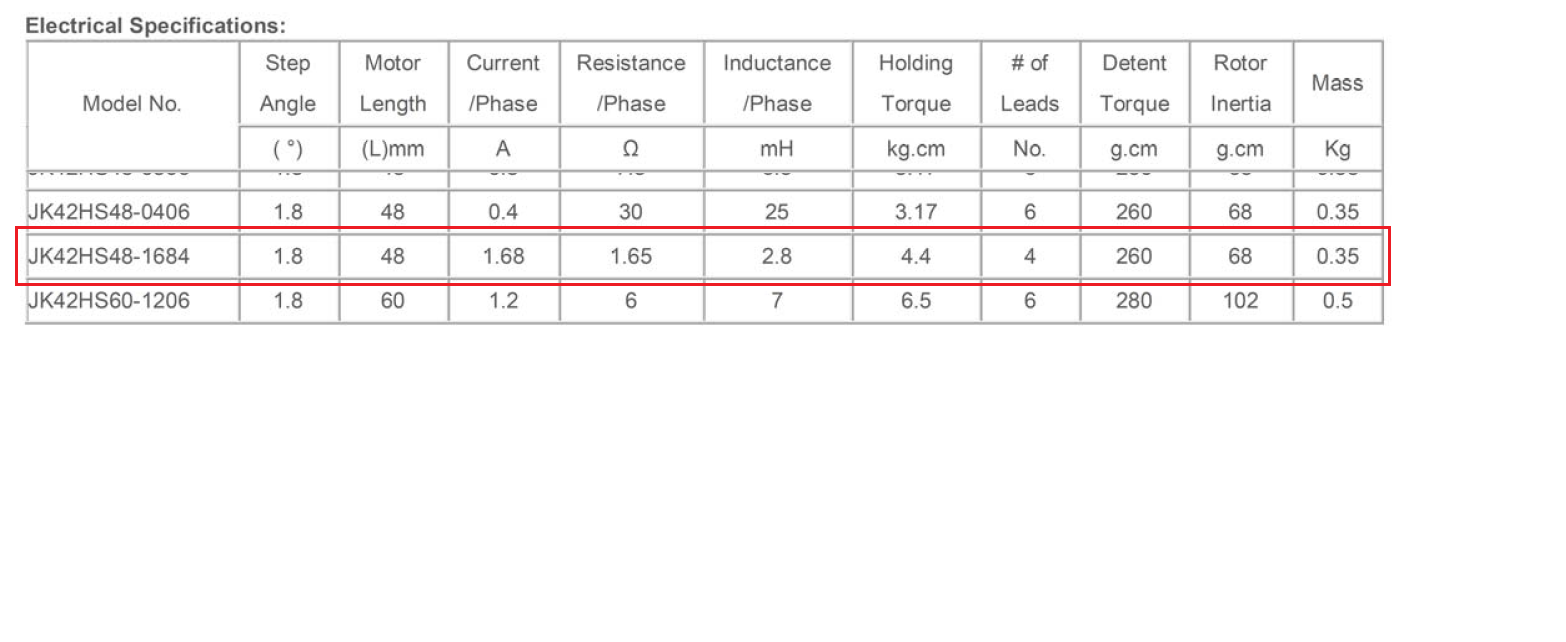
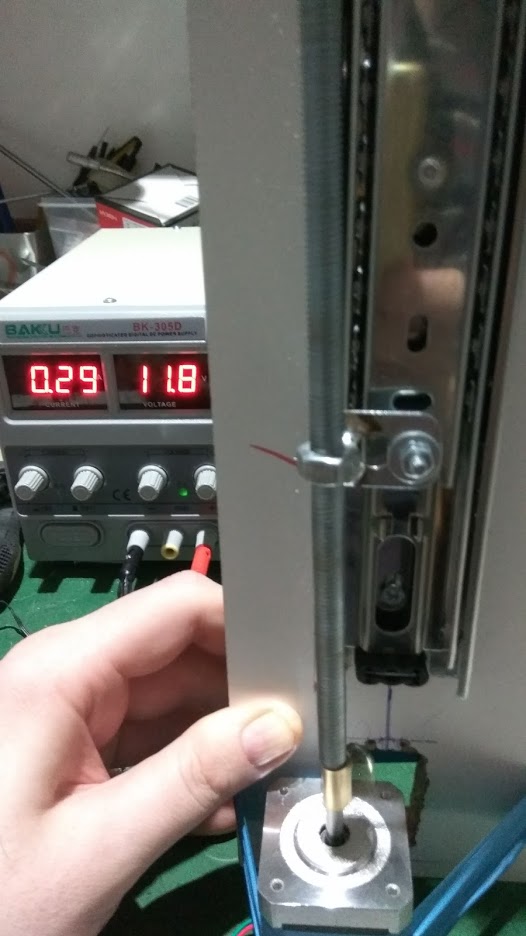
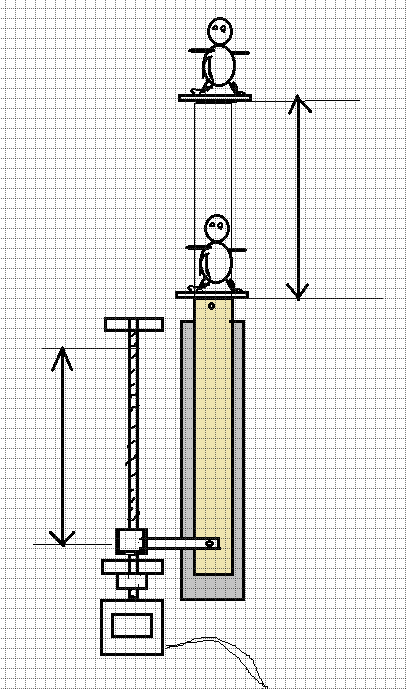
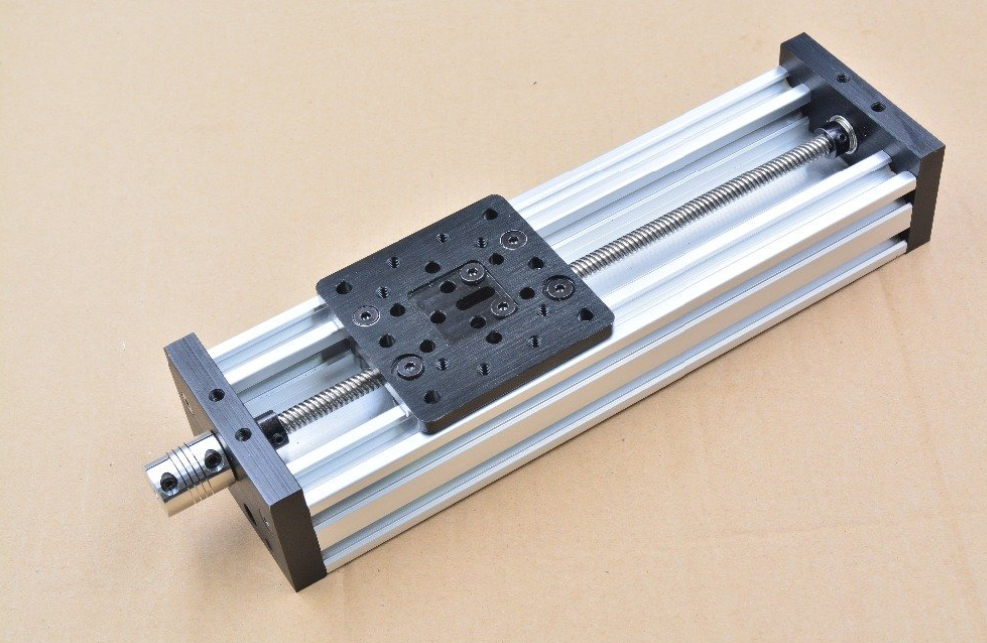
Pozdrav strpljivima na pokusaju da razumeju moja pitanja...  Pravim neke pocetnicke korake za jedan mali projekat. U principu mi servo motor odgovara zbog jednostavnosti kontrole. Kupljen mg996 kod jedne domace firme, nakon par testova sa malo vecim opterecenjem zupcanik u reduktoru otkazuje. Ovaranjem vidim da je samo glavni prenosnik metalan, ostali plasticni, sto ne bi trebalo da bude. Bez obzira na to, vidim da ce mi u svakom slucaju trebati neki jaci, medjutim ovde ne nalazim nista osim ovog ovakvog, i plasticnih sg90. Ako neko ima nekog ko prodaje po pristojnoj ceni ove neka baci na pp, ili je jedina opcija bangood ali i sl. za nabavku?Druga varijanta je da nabavim neki step motor pa da se sa njim igram, sto je za mene dosta kompleksnije, pa bi mi znacila neka priblizna informacija: koji bi bio minimalno potreban da preko npr brezona podigne predmet npr 500gr tezine podize i spusta nekih 20-30cm vertikalno. Drugo jos ludje pitanje, koliko brzo moze da podigne takav predmet a da pri tom neko ko sedi pored njega ne poludi od onog bzzz, bzzz. Bio bi koliko toliko u nekoj kutiji, ali ne skroz zatvoren pa bi bilo dobro da nije previse glasan, a da sa druge strane da mu ne treba mu cela vecnost da ode iz jednog polozaja u drugi... Kao primer servo je (dok je bio ziv), podizao (manji predmet) od oko 100gr dizao (sistemom poluge kao kod radilice motora) za nekih 2-3sec otprilke ma visinu od 20cm a da je pri tom bio usporen toliko da se jedva cuo na stolu (i on se dosta cuje kada radi na maxx brzini). Da li bi slicne performanse imao i stepper sa svojom navojnom sipkom i predmetom na njemu? |









 , takodje ne radi. Srecom imam ih jos 3, pa mi tu nije prob. Verovatno je otkazao kada i sam uno. Neki spajk (lee) ih izgleda ubio oboje istovremeno.
, takodje ne radi. Srecom imam ih jos 3, pa mi tu nije prob. Verovatno je otkazao kada i sam uno. Neki spajk (lee) ih izgleda ubio oboje istovremeno.